D
Motion Parameter Lists
A-20
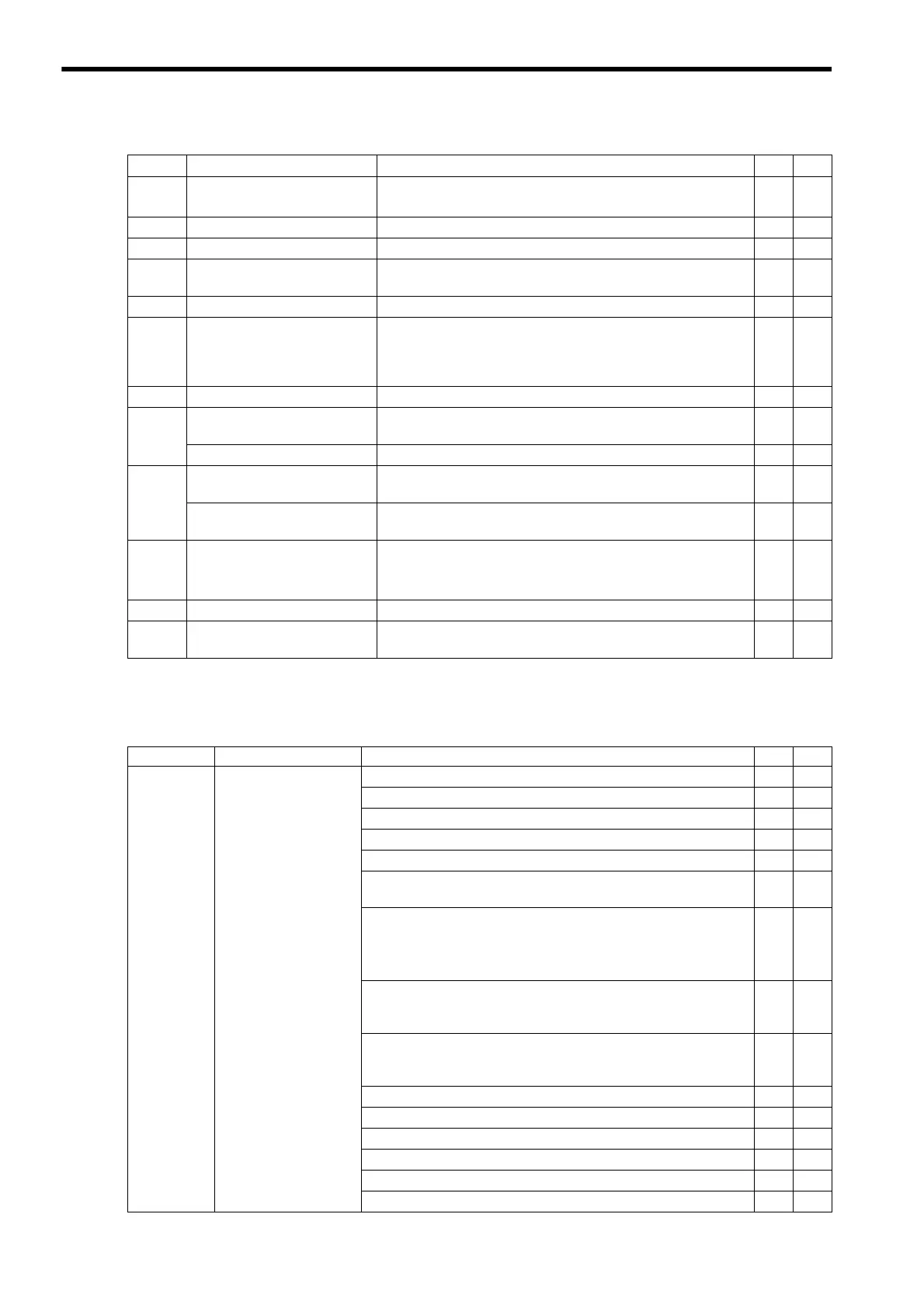
D.2 Setting Parameter List
10
Infinite Length Axis Reset
Position (POSMAX)
1 = 1 reference unit
Invalid for linear type
Yes Yes
12
Positive Software Limit Value
1 = 1 reference unit
Yes
14
Negative Software Limit Value
1 = 1 reference unit
Yes
16
Backlash Compensation
Amount
1 = 1 reference unit
Yes
18 to 29
−
Reserved for system use.
−−
30
Encoder Selection
0: Incremental encoder
1: Absolute encoder
2: Absolute encoder (Incremental encoder is used.)
3: Reserved (External encoder)
Yes
31 to 33
−
Reserved for system use.
−−
34
Rated Motor Speed (Rotary
Motor)
1 = 1 min
-1
Yes Yes
Rated Speed (Linear Motor)
1 = 0.1 m/s, 0.1 mm/s
Yes Yes
36
Number of Pulses per Motor
Rotation (Rotary Motor)
1 = 1 pulse/rev
Set the value after multiplication.
Yes Yes
Number of Pulses per Linear
Scale Pitch (Linear Motor)
1 = 1 pulse/scale pitch
Yes Yes
38
Maximum Number of Absolute
Encoder Turns Rotation
1 = 1 rotation
Set to 0 when a direct drive motor is being used.
Invalid for linear type
Yes
40 to 41
−
Reserved for system use.
−−
42
Feedback Speed Movement
Averaging Time Constant
1 = 1 ms
Yes Yes
(cont’d)
No. Name Contents SVB SVR
Register No. Name Contents SVB SVR
OW
00
RUN Command
Setting
Bit 0: Servo ON (0: OFF/1: ON)
Yes Yes
Bit 1: Machine Lock (0: Normal Operation/1: Machine Lock)
Yes
Bits 2 to 3: Reserved for system use
Bit 4: Latch Detection Demand (0: OFF/1: ON)
Yes
Bit 5: Reserved for system use
Bit 6: POSMAX Turn Number Presetting Demand
(0: OFF/1:ON)
Yes Yes
Bit 7: Request ABS Rotary Pos. Load (Absolute system infinite
length position information LOAD)
(0: OFF/1:ON)
Set to 0 for linear type
Yes
Bit 8: Forward Outside Limiting Torque/Thrust Input (Forward
external torque/thrust input)
(0: OFF/1: ON)
Yes
Bit 9: Reverse Outside Limiting Torque/Thrust Input (Forward
external torque/thrust input)
(0: OFF/1: ON)
Yes
Bit A: Reserved for system use
Bit B: Integration Reset (0: OFF/1: ON)
Yes
Bit C: Reserved for system use
Bit D: Latch completion status clear request
Yes
Bit E: Communication Reset (0: OFF/1: ON)
Yes
Bit F: Alarm Clear
Yes Yes