5 Operation
5.3.7 Setting Encoder Output Pulse
5-30
5.3.7 Setting Encoder Output Pulse
Set the encoder output pulse using the following parameter.
Pulses from the encoder per revolution are divided inside the SERVOPACK by the number set in this parame-
ter before being output. Set the number of encoder output pulses according to the system specifications of the
machine or host controller.
Note 1. An encoder output pulse setting error (A.041) will occur if the setting does not satisfy the required conditions
listed in the table.
Pn212 = 25000 (P/Rev) is accepted, but
Pn212 = 25001 (P/Rev) is not accepted. The alarm A.041 is output because the setting unit differs from that in
the above table.
2. The upper limit of the pulse frequency is approximately 1.6 Mpps.
The servomotor speed is limited if the setting value of the encoder output pulses (Pn212) is large.
An overspeed of encoder output pulse rate alarm (A.511) will occur if the motor speed exceeds the upper limit
specified in the above table.
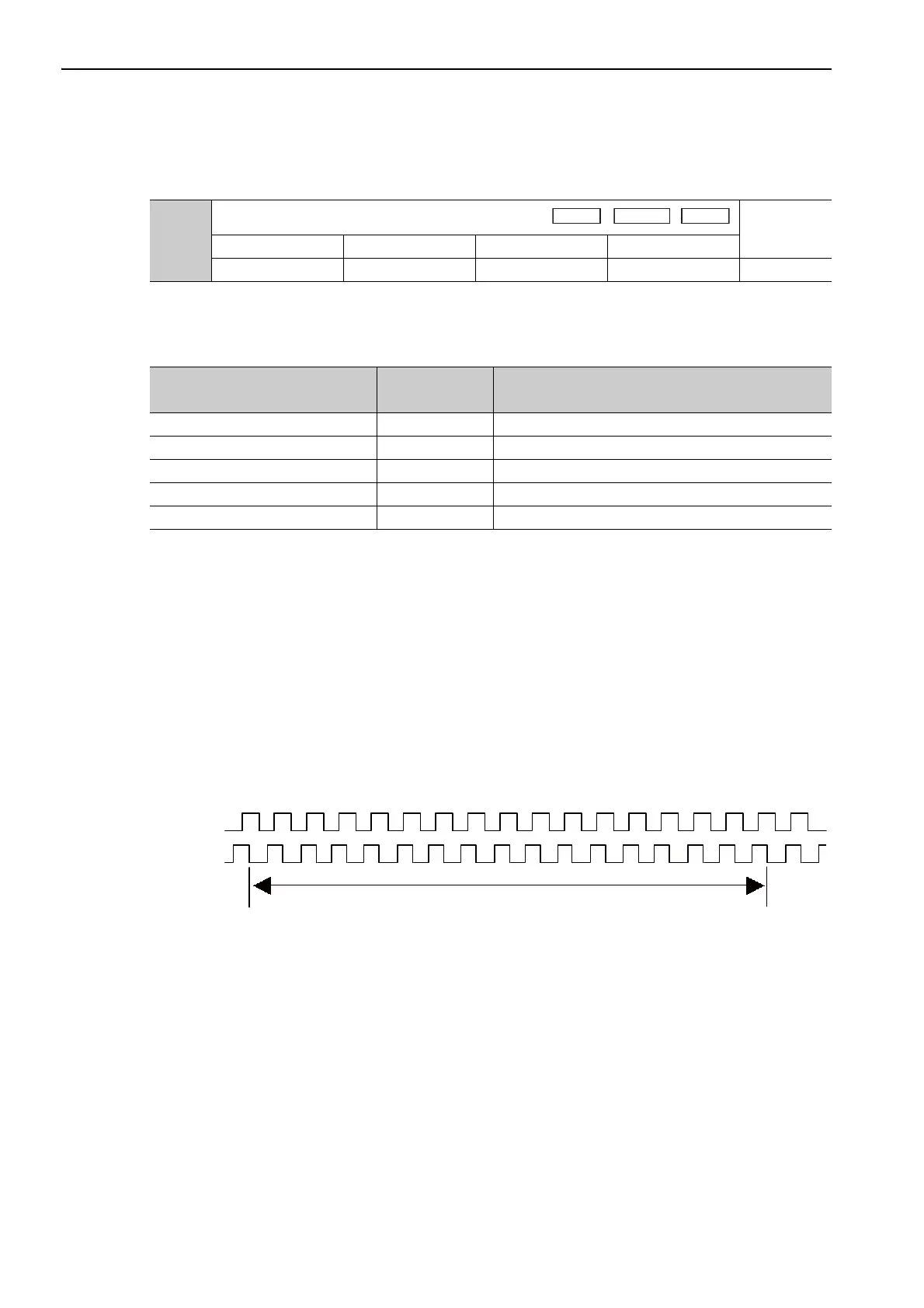
Output Example: When Pn212 = 16 (16-pulse output per one revolution), PAO and PBO are output as shown
below.
Pn212
Encoder Output Pulses
Classification
Setting Range Setting Unit Factory Setting When Enabled
16 to 1073741824 1 P/rev 2048 After restart Setup
Setting Range of Encoder Output
Pulses (P/Rev)
Setting Unit Upper Limit of Servomotor Speed for
Set Encoder Output Pulses [min
-1
]
16 to 16384 16000
16386 to 32768 23000
32772 to 65536 41500
65544 to 131072 8 750
131088 to 262144 16 375
Position
Preset value: 16
One revolution
PAO
PBO
12345678910111213141516

 Loading...
Loading...





