6.9 Compatible Adjustment Function
6-67
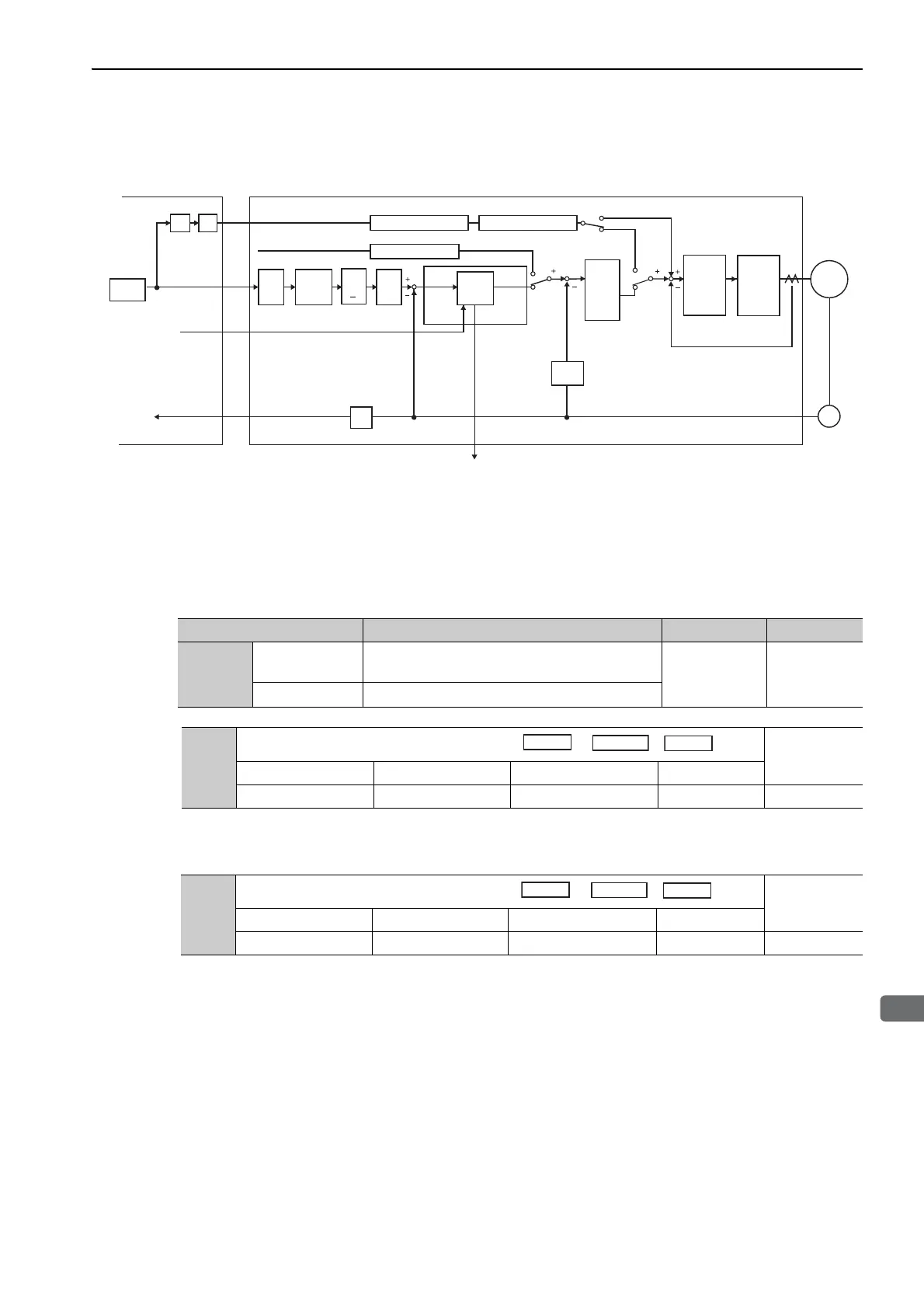
SERVOPACK in Position Control
(2) Related Parameters
Torque feedforward is set using the parameters Pn002, Pn400, and Pn415.
The factory setting is Pn400 = 3.0 V/rated torque.
For example, the torque feedforward value is
±3 V, then, the torque is limited to ±100% of the rated torque.
Note 1. Too high a torque feedforward value will result in overshooting. To prevent such troubles, set the optimum value
while observing the system responsiveness.
2. The torque feedforward function cannot be used with torque limiting by analog voltage reference.
COIN
M
Pn200.0 Pn218 Pn20E
Pn210
Pn400
T-REF
V-REF
CLR
PULS, SIGN
K
FF
Pn300
Pn415
Pn212
Pn216
Pn217
Pn002.0
ENC
Pn000.1 Pn000.1
SERVOPACK (in position control)
Divider
K
FF
: Feedforward gain
Clear input
Speed reference input gain
T-REF filter time constant
Position
reference
Differe-
ntial
Host controller
Servomotor
Torque reference input gain
Refer-
ence
pulse
form
Smooth-
ing
Position
feedback
Error
counter
Pn522 positioning
completed width
Speed
conver-
sion
Speed
control
section
Current
control
section
Power
amplifier
Current feedback
Speed feedback
Position control
section
Encoder
output pulse
Elec-
tronic
gear
B
A
Reference
Pulse
Multiplier
× n
Parameter Meaning When Enabled Classification
Pn002
n.
0 [Fac-
tory setting]
Disabled
After restart Setup
n.
2
Uses T-REF terminal for torque feedforward input.
Pn400
Torque Reference Input Gain
Classification
Setting Range Setting Unit Factory Setting When Enabled
10 to 100 0.1 V/rated torque 30 Immediately Setup
Pn415
T-REF Filter Time Constant
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 65535 0.01 ms 0 Immediately Setup
Speed

 Loading...
Loading...





