Parameters 201
Motor torque 01.10 Motor torque (page 152). 6
DC voltage 01.11 DC voltage (page 152). 7
Power inu out 01.14 Output power (page 153). 8
Speed ref ramp in 23.01 Speed ref ramp input (page 257). 10
Speed ref ramp out 23.02 Speed ref ramp output (page 257). 11
Speed ref used 24.01 Used speed reference (page 263). 12
Torq ref used 26.02 Torque reference used (page 279). 13
Freq ref used 28.02 Frequency ref ramp output (page 285). 14
Process PID out 40.01 Process PID output actual (page 341). 16
Process PID fbk 40.02 Process PID feedback actual (page 341). 17
Process PID act 40.03 Process PID setpoint actual (page 341). 18
Process PID dev 40.04 Process PID deviation actual (page 341). 19
Force Pt100
excitation
The output is used to feed an excitation current to 1…3 Pt100
sensors. See section Motor thermal protection (page 116).
20
Force KTY84
excitation
The output is used to feed an excitation current to a KTY84
sensor. See section Motor thermal protection (page 116 ).
21
Force PTC
excitation
The output is used to feed an excitation current to 1…3 PTC
sensors. See section Motor thermal protection (page 116).
22
Force Pt1000
excitation
The output is used to feed an excitation current to 1…3
Pt1000 sensors. See section Motor thermal protection (page
116).
23
AO1 data storage 13.91 AO1 data storage (page 204). 37
AO2 data storage 13.92 AO2 data storage (page 204). 38
Other Source selection (see Terms and abbreviations on page 148). -
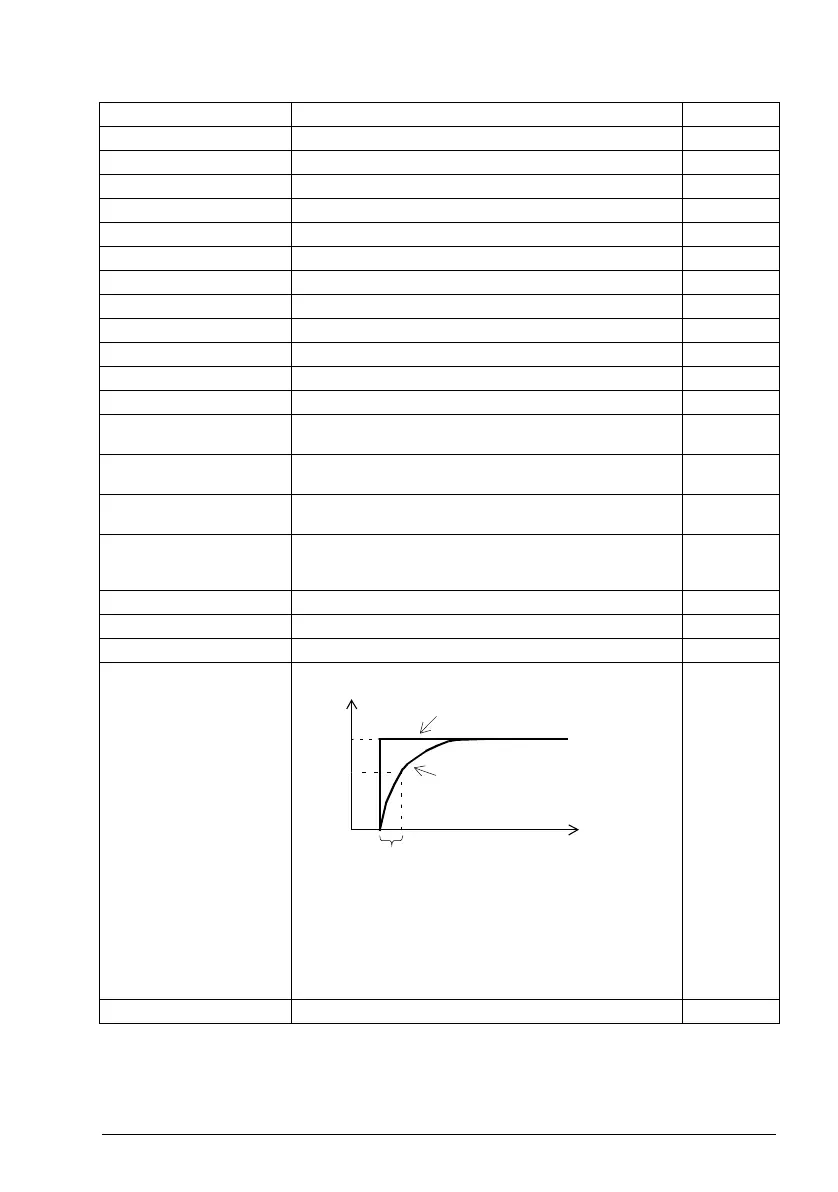
13.16 AO1 filter time Defines the filtering time constant for analog output AO1. 0.100 s
0.000 … 30.000 s Filter time constant. 1000 = 1 s
No. Name/Value Description Def/FbEq16
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = filter input (step)
O = filter output
t = time
T = filter time constant
Unfiltered signal
Filtered signal

 Loading...
Loading...











