Commissioning
EL72x192 Version: 3.3
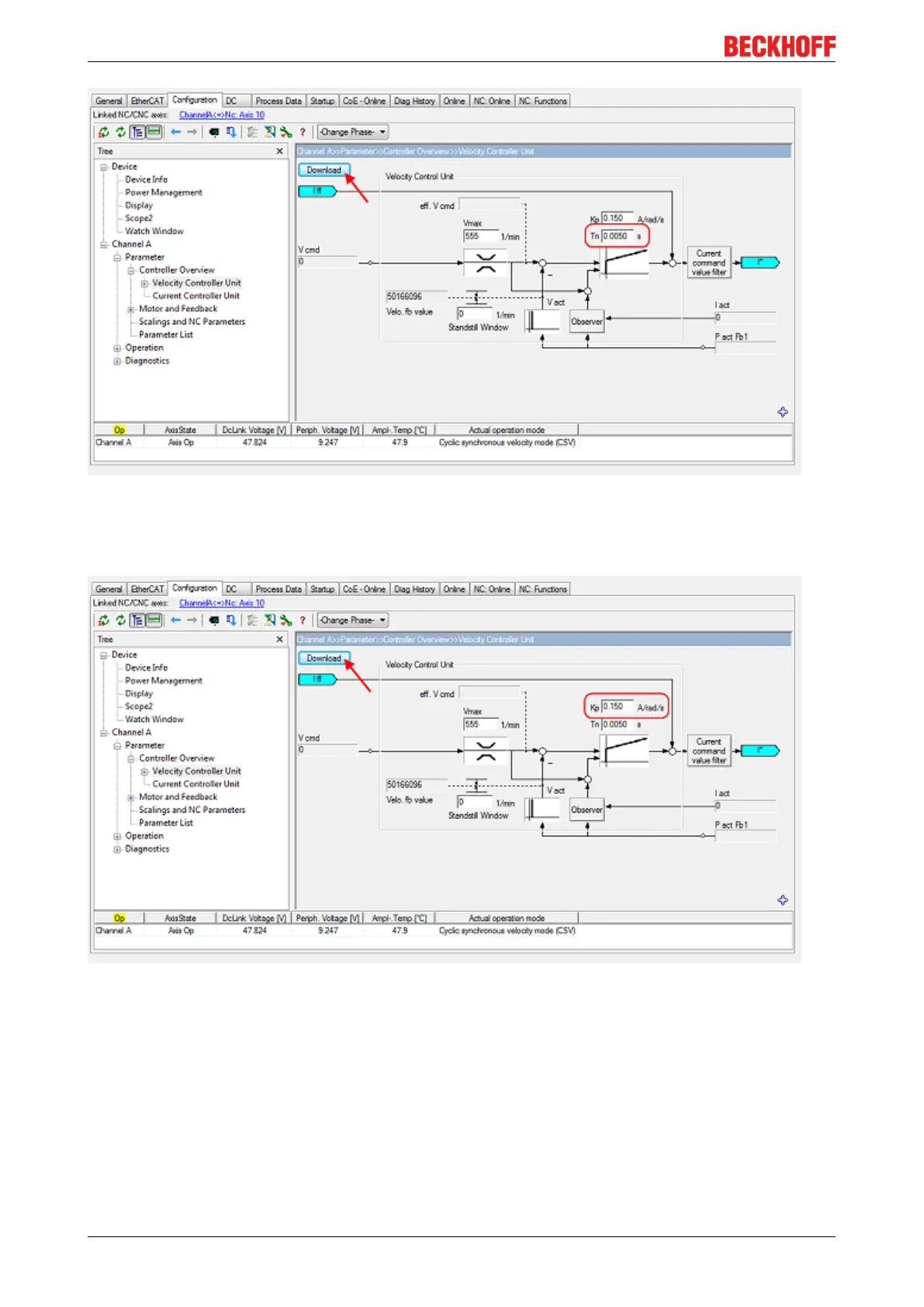
Fig.112: Adapting Tn
Proportional velocity controller component Kp
• Increase the value, until the motor starts to oscillate slightly. Then reduce the value by 80%.
Fig.113: Adapting Kp
6.2.3 Settings in the CoE register
(Master TwinCAT 2.11 R3)
The data provided in this section as an example refer to an AM3121-0200-0001 servomotor from Beckhoff
Automation. For other motors the values may vary, depending on the application.
 Loading...
Loading...










