Setup & Operation 12. I/O Remote Settings
.
.
.
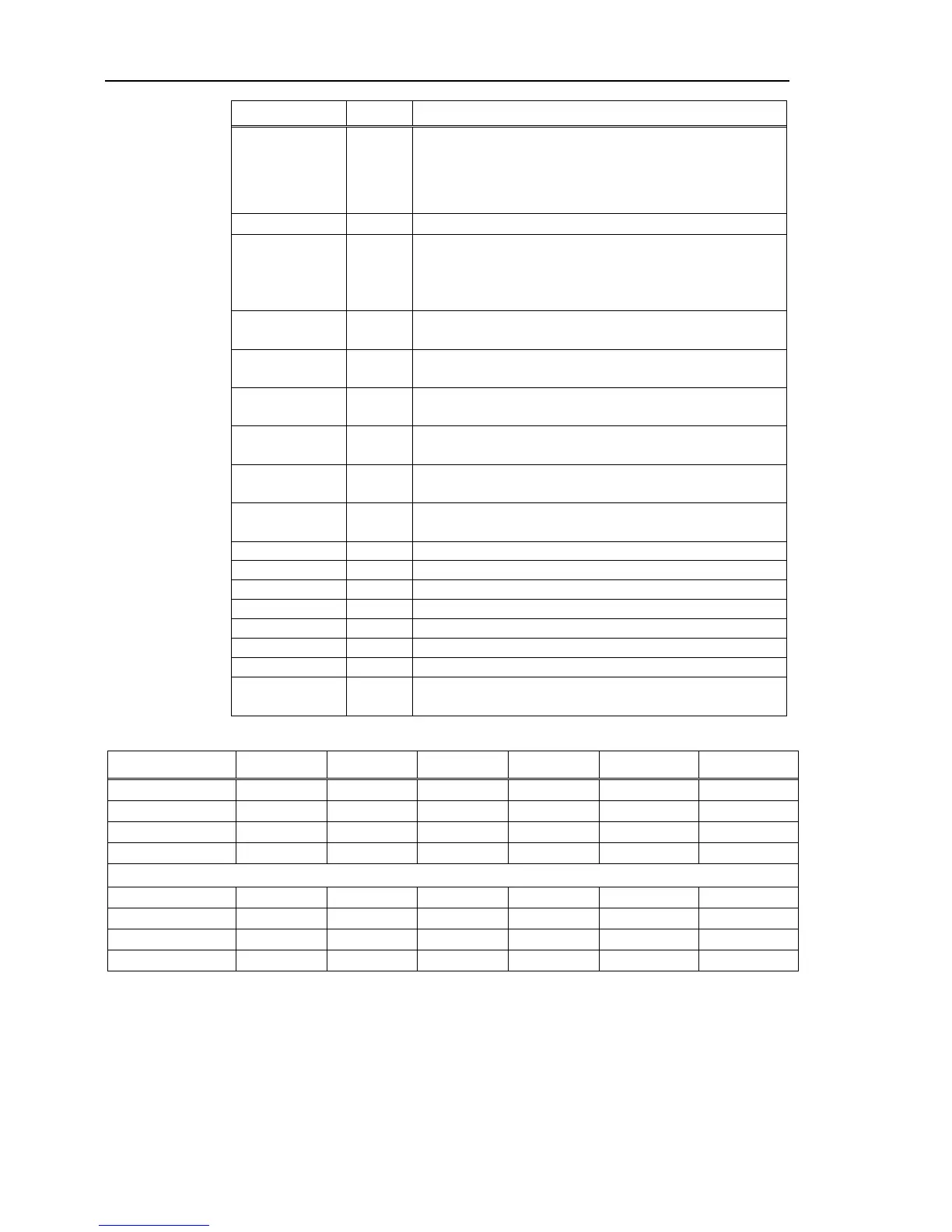
InsidePlane15
Not set
Turns ON when the robot is in the approach check plane.
For details, refer to EPSON RC+ 7.0 Online Help or
Plane in SPEL
+
Language Reference.
Not set Turns ON when any of the alarms is occurring.
.
.
.
Alarm9
Not set
Turns ON when an alarm is occurring.
PositionX Not set
Outputs current X coordinate in the World coordinate
system (*6) (*7)
PositionY Not set
Outputs current Y coordinate in the World coordinate
system (*6) (*7)
Outputs current Z coordinate in the World coordinate system
(*6) (*7)
PositionU Not set
Outputs current U coordinate in the World coordinate
system (*6) (*7)
PositionV Not set
Outputs current V coordinate in the World coordinate
system (*6) (*7)
PositionW Not set
Outputs current W coordinate in the World coordinate
system (*6) (*7)
Outputs the current torque value of Joint #1 (*6) (*7)
Outputs the current torque value of Joint #2 (*6) (*7)
Outputs the current torque value of Joint #3 (*6) (*7)
Outputs the current torque value of Joint #4 (*6) (*7)
Outputs the current torque value of Joint #5 (*6) (*7)
Outputs the current torque value of Joint #6 (*6) (*7)
Outputs the CPU load factor of the user program (*8)
Outputs how many times emergency stops have been
executed.
(*1) Outputs the current or the last function number of CurrProg1, 2, 4, 8, 16, or 32.
Function name CurrProg1 CurrProg2 CurrProg4 CurrProg8 CurrProg16 CurrProg32
0=OFF, 1=ON
(*2) Remote function is available in the followings conditions.
- The setting is Auto mode and the control device is remote.
- The setting is Program mode and Remote I/O is enabled.
(*3) For details, refer to EPSON RC+ 7.0 Online Help or Box in SPEL
+
Language Reference.
(*4) For details, refer to EPSON RC+ 7.0 Online Help or Plane in SPEL
+
Language Reference.
64 RC90 (EPSON RC+ 7.0) Rev.4
 Loading...
Loading...





