T3-B T6-B Manipulator 14. I/O Remote Settings
T-B series Rev.1 129
.
.
.
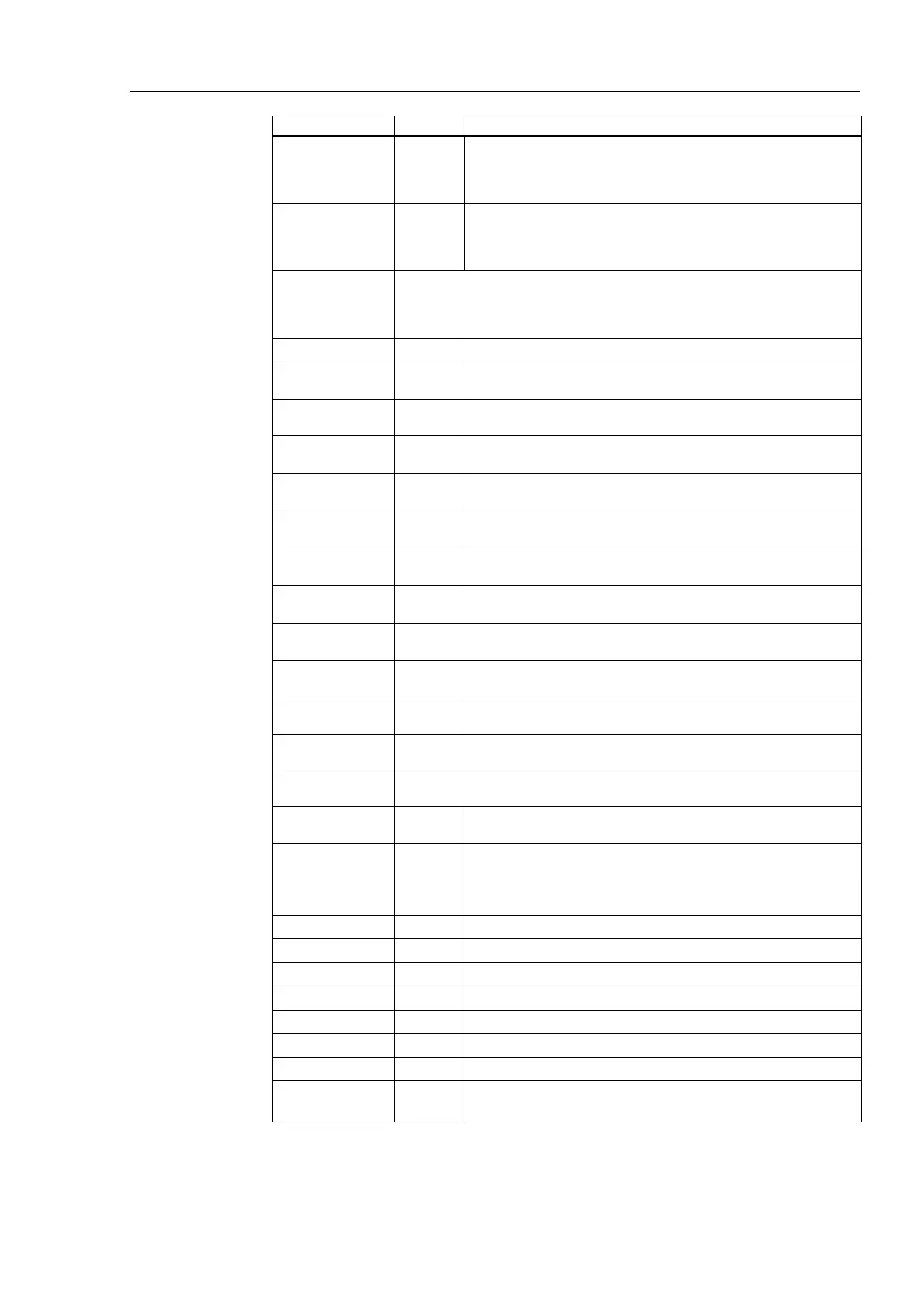
Not set
Indicates the error number.
.
.
.
Not set
Turns ON when the manipulator is in the approach check
area. (*3)
.
.
.
Not set
Turns ON when the manipulator is in the approach check
plane. (*4)
Turns ON when any of the alarms is occurring. (*9)
Alarm1
Not set
Turns ON when a battery alarm of the manipulator is
occurring. (*12)
Alarm2
Not set
Turns ON when a battery alarm of the manipulator connected
to CU is occurring. (*12)
Alarm3
Not set
Turns ON when a grease alarm of the manipulator connected
to CU is occurring. (*10) (*12)
Alarm4
Not set
Turns ON when a battery alarm of the manipulator connected
to DU1 is occurring. (*12)
Alarm5
Not set
Turns ON when a grease alarm of the manipulator connected
to DU1 is occurring. (*10) (*12)
Alarm6
Not set
Turns ON when a battery alarm of the manipulator connected
to DU2 is occurring. (*12)
Alarm7
Not set
Turns ON when a grease alarm of the manipulator connected
to DU2 is occurring. (*10) (*12)
Alarm8
Not set
Turns ON when a battery alarm of the manipulator connected
to DU3 is occurring. (*12)
Alarm9
Not set
Turns ON when a grease alarm of the manipulator connected
to DU3 is occurring. (*10) (*12)
PositionX Not set
Outputs current X coordinate in the World coordinate system
(*6) (*7)
PositionY Not set
Outputs current Y coordinate in the World coordinate system
(*6) (*7)
PositionZ Not set
Outputs current Z coordinate in the World coordinate system
(*6) (*7)
PositionU Not set
Outputs current U coordinate in the World coordinate system
(*6) (*7)
PositionV Not set
Outputs current V coordinate in the World coordinate system
(*6) (*7)
PositionW Not set
Outputs current W coordinate in the World coordinate system
(*6) (*7)
Outputs the current torque value of Joint #1 (*6) (*7)
Outputs the current torque value of Joint #2 (*6) (*7)
Outputs the current torque value of Joint #3 (*6) (*7)
Outputs the current torque value of Joint #4 (*6) (*7)
Outputs the current torque value of Joint #5 (*6) (*7)
Outputs the current torque value of Joint #6 (*6) (*7)
Outputs the CPU load factor of the user program (*8)
ESTOP Not set
Outputs how many times emergency stops have been
executed.

 Loading...
Loading...







