T3-B T6-B Manipulator 5. Motion Range
T-B series Rev.1 81
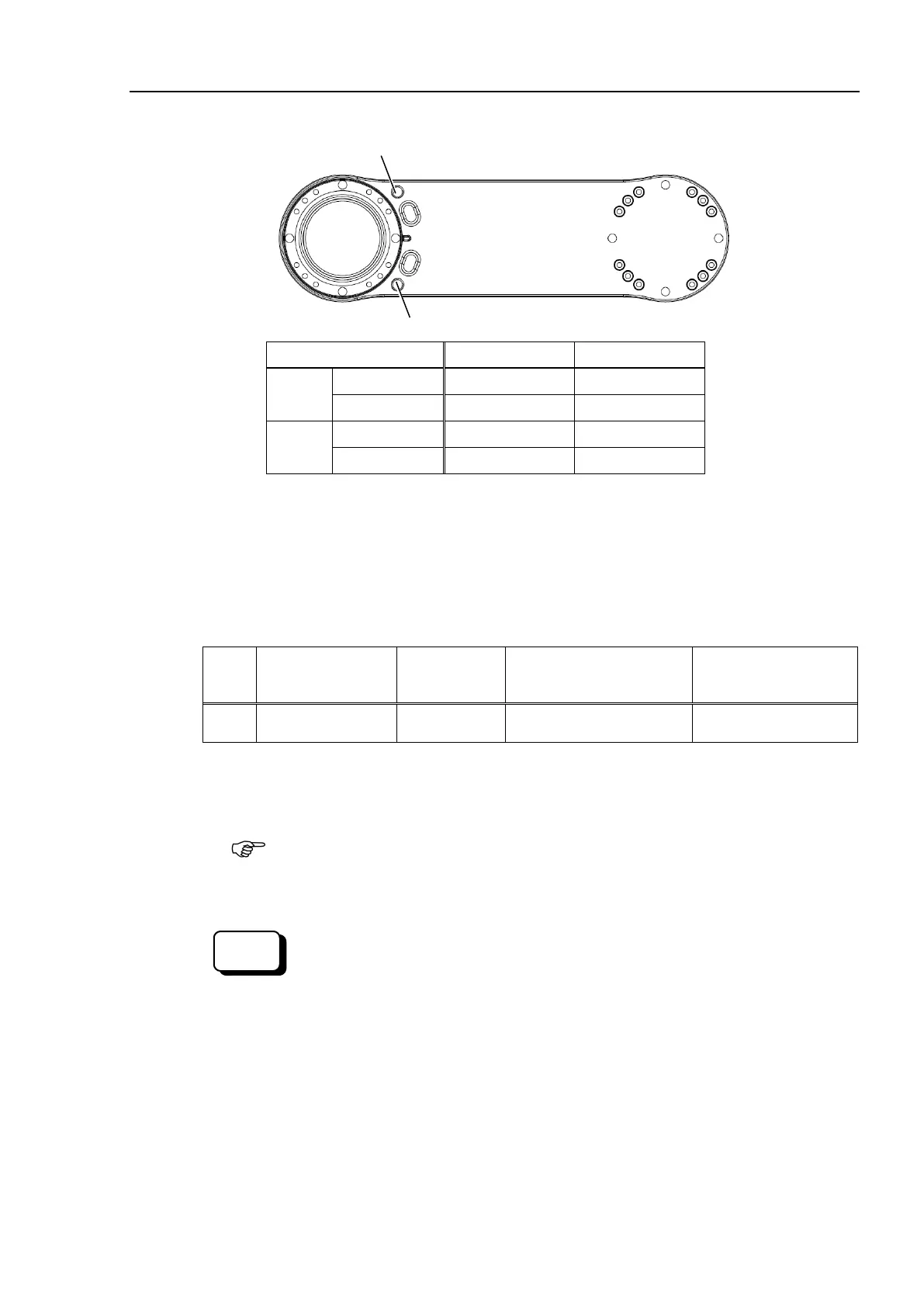
Joint #2 Mechanical Stops (Views from the top of Arm #1)
T3-B
°
−
°
273066pulse −273066pulse
T6-B
°
−
°
−
Manipulator.
a hexagon socket head cap bolt into the hole corresponding to the setting angle,
and
tighten it.
-B Joint #2 only
Remove the user plate on the arm cover.
For details, refer to T-B series Maintenance Manual “7. Cover”.
Joint
head cap bolt
The number
of bolts
Strength
Recommended
tightening torque
1
Equivalent to ISO898-1
property class 10.9 or 12.9
12.3 N⋅m (125 kgf⋅cm)
3)
Manipulator.
4)
Set the pulse range corresponding to the new positions of the mechanical stops.
Be sure to set the pulse range
inside the positions of the mechanical stop range.
Using T3-B401S
The angle of Joint #1 is set from –110° to +110°.
The angle of Joint #2 is set from -120° to +120°.
Execute the following commands from the [Command Window]
>JRANGE 1, -45512, 455112 ' Sets the pulse range of Joint #1
>JRANGE 2,- 273066, 273066 ' Sets the pulse range of Joint #2
>RANGE ' Checks the setting using Range
-45512, 455112, -273066, 273066, -187734
,0, -71760, 71760
5)
Move the arm by hand until it touches the mechanical stops
, and make sure that
any peripheral equipment during operation.

 Loading...
Loading...







