T3-B T6-B Manipulator 5. Motion Range
T-B series Rev.1 83
A mechanical stop is mounted on both the top and bottom of Joint #3.
However, only the
position of the lower limit mechanical stop on the top can be changed.
Do not remove
the upper limit mechanical stop on the bottom because the calibration point of Joint #3
is specified
using the stop.
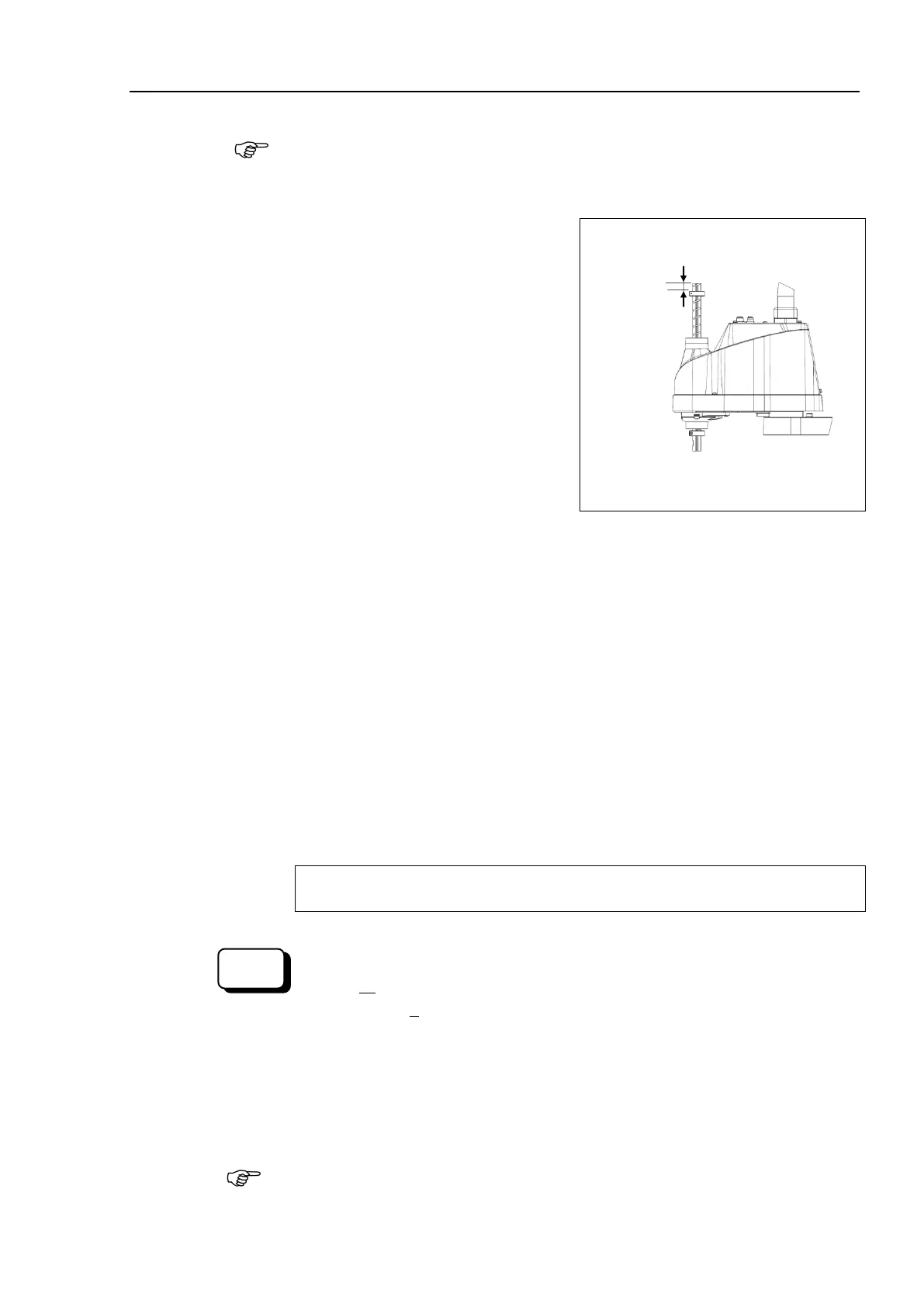
The upper end of the shaft
defines the
Move the lower limit
mechanical stop down by the length you
want to limit the stroke.
For example, when the lower limit
mechanical stop is set at “
150 mm” stroke,
the lower limit Z coordinate value is “
-
”. To change the value to “-130”,
move the lower limit mechanical stop
down
“20 mm”. Use calipers to measure
adjusting the
stop.
6)
Firmly tighten the lower limit mechanical stop screw
(T3-B: M3×10, T6-B: M4×15).
Recommended tightening torque:
T3-B: 2.4±0.1 N⋅m
T6-B: 5.5±0.25 N⋅m
7)
Manipulator.
Joint #3 to its lower limit while pressing the brake release switch, and
limit position. Do not lower the mechanical stop too far.
not reach a target position.
Calculate the lower limit pulse
value of the pulse range using the formula
shown below
and set the value.
he result of the calculation is always negative because t
he lower limit Z coordinate
value
is negative.
Lower limit of pulse (pulse)
= lower limit Z coordinate value (mm) / Joint #3 resolution (mm/pulse)**
** For the Joint #3 resolution, refer to “Appendix A: Specifications”
Execute the following command from the [Command Window].
value in X.
>JRANGE 3,X,0 ' Sets the pulse range of Joint #3
10)
Pulse command (Go Pulse command), move
Joint #3 to the lower limit
position of the pulse range at low speed.
If the mechanical stop range is less
than the
pulse range, Joint #3
will hit the mechanical stop and an error will occur. When the
error
occurs, either change
the pulse range to a lower setting
or extend the position of the
mechanical stop within the limit.
If it is difficult to check whether Joint #3 hits a mechanical stop, turn OFF the
Manipulator and lift the arm top cover to check the condition causing the problem from
the side.

 Loading...
Loading...







