ADV100 • Functions description and parameters list 35
Selection of the origin (source) of the signal to preset the motor potentiometer function. The signal to be associated
with this function can be selected from the “L_DIGSEL2” selection list.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
8.12 892 Mpotmode ENUM
Fine&Last val
0 3 ERW FVS
Setting of the conguration of two possible options of the Motor potentiometer function. There are two operating
modes for each of the two options.
0 Ramp&Last val
1 Ramp&Follow
2 Fine&Last val
3 Fine&Follow
Option 1: Behaviour of the Motor potentiometer function with the Stop or FastStop command present with the Con-
trolmode=Ramp parameter.
The two operating modes are: Lastval or Follow.
With the Control mode not equal to Ramp setting, this option is not completely applicable and it always behaves in
Last val mode.
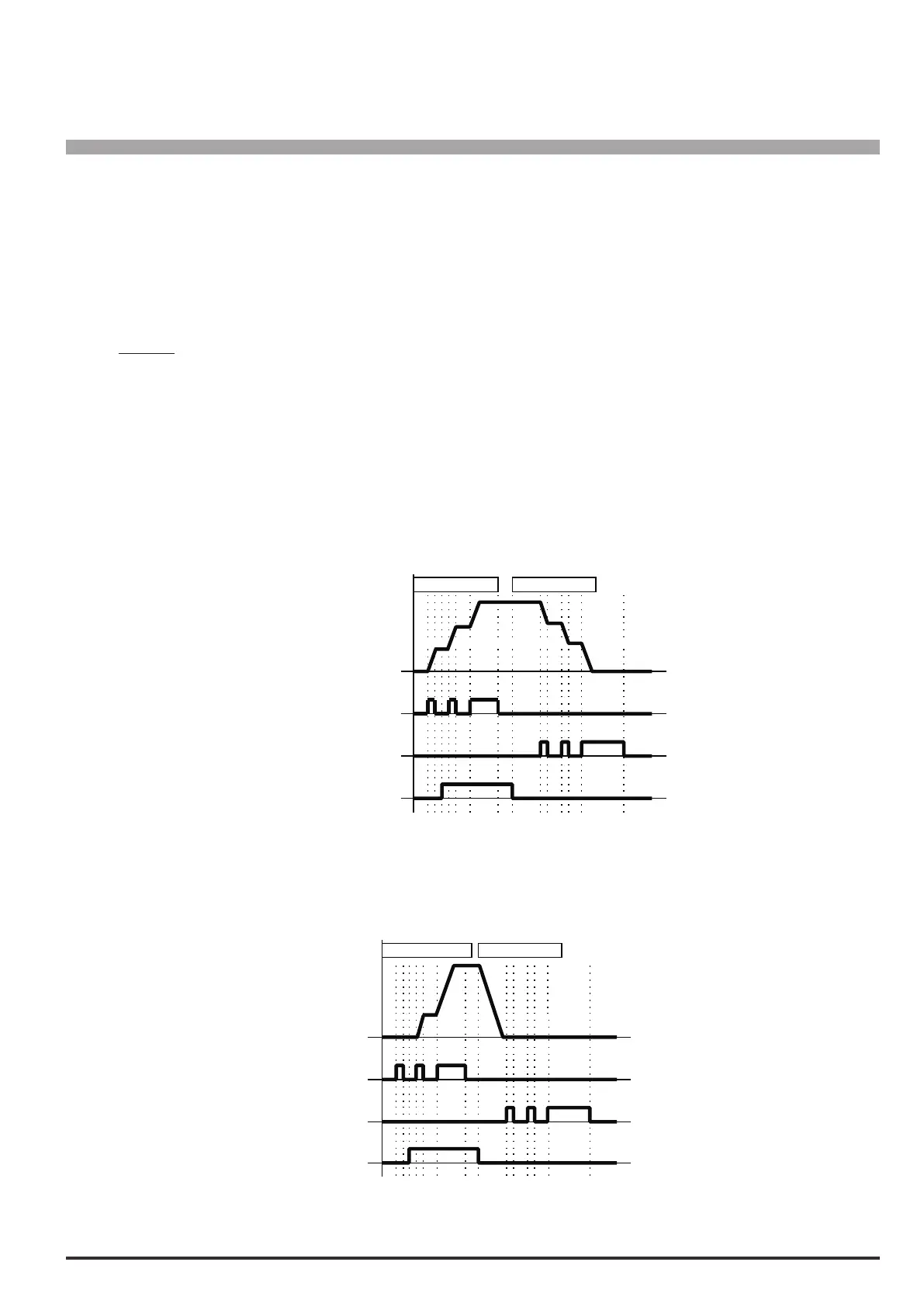
In Lastval mode with the Stop or FastStop command present, the speed reference of the Motor potentiometer func-
tion is not altered.
The motor speed moves to 0 according to the selected control mode (Controlmode=Ramp or Controlmode=
Speed). When the Run command is sent, the motor speed moves to the speed reference set by the motor potenti-
ometer function according to the selected control mode.
Up
Down
Mpot output mon Mode:Last val
Start
In Follow mode with the Stop or FastStop command present, the Down command is simulated, i.e. the output of the
Motor potentiometer function moves to 0 with the set ramp time.
If the Run command is sent when the 0 speed has been reached, it is maintained until the Up command is sent.
If the Run command is sent before the motor reaches the 0 speed, the speed at that moment is taken as the new
reference.
Up
Down
Monitor uscita Mpot
Mod.:Seguente
Start