ADV100 • Functions description and parameters list 79
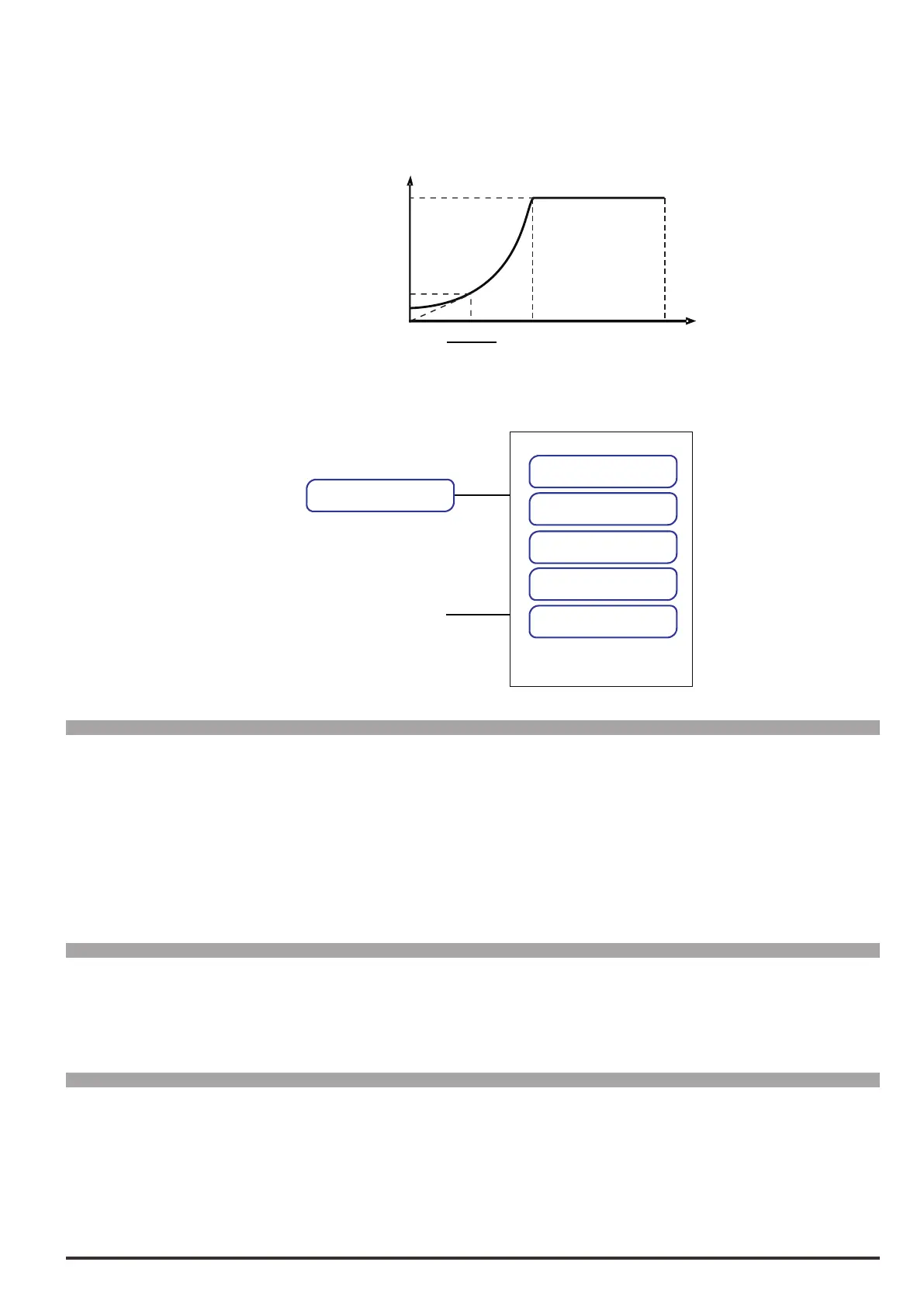
Set 2 (Quadratic) to obtain a quadratic V/f characteristic curve, useful for controlling pumps and fans, where torque
is proportional to the square of the speed. When this type of curve is selected, the median voltage point is xed at
0.25% of the maximum output voltage (par.2406), and the median frequency point at 50% of the basic frequency
(par.2408).
Par.2406
Par.2408
(Par.2410 x 0,25)
Par.2400
Par.2412
V
Hz
Slip comp
Measured speed
Speed setpoint
PAR 664
Slip comp filter
PAR 2442
Slip comp
PAR 2440
Slip I gain
PAR 2448
Slip P gain
PAR 2446
Slip comp mode
PAR 2444
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.10 2440 Slipcomp Hz FLOAT CALCF 0.0 10.0 RWS V
Setting of the slip compensation. When the asynchronous motor is loaded, the mechanical speed of the motor shaft
varies according to the electric slippage, which affects torque generation. The slip compensation function can be
used to maintain a constant motor shaft speed. Compensation is performed by varying the drive output frequency
as a function of its output current and the motor parameters. Thus, to obtain the best effect, the motor plate data
must be set appropriately, and the correct stator resistance value (Par.2050) must be set or measured using the
self-tuning function, The slip compensation value is calculated automatically during the self-tuning procedure or set
manually in this parameter.
During slip compensation tuning the drive must not be in the current limit condition.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.11 2442 Slipcompfilter ms UINT16 200 50 5000 ERW V
Setting of the slip compensation lter. The value set in this parameter determines the slip compensation function
reaction time. The lower this parameter is set, the greater the slip compensation reaction. If this parameter is too low,
it could cause undesirable oscillations in speed after sudden variations to the applied load.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.12 2444 Slipcompmode ENUM Open loop 0 1 ERW V
Setting of the slip compensation mode.
0 Open loop
1 Closed loop