Chapter 7 Appendix
209
7.4.3 Work Coordinate System
It is the 32 kinds of coordinate systems defined by the offset of each axis against the base
coordinate system.
Work Coordinate System No. 0 is reserved as Base Coordinate System (= Work Coordinate
System Offset = 0) by the system.
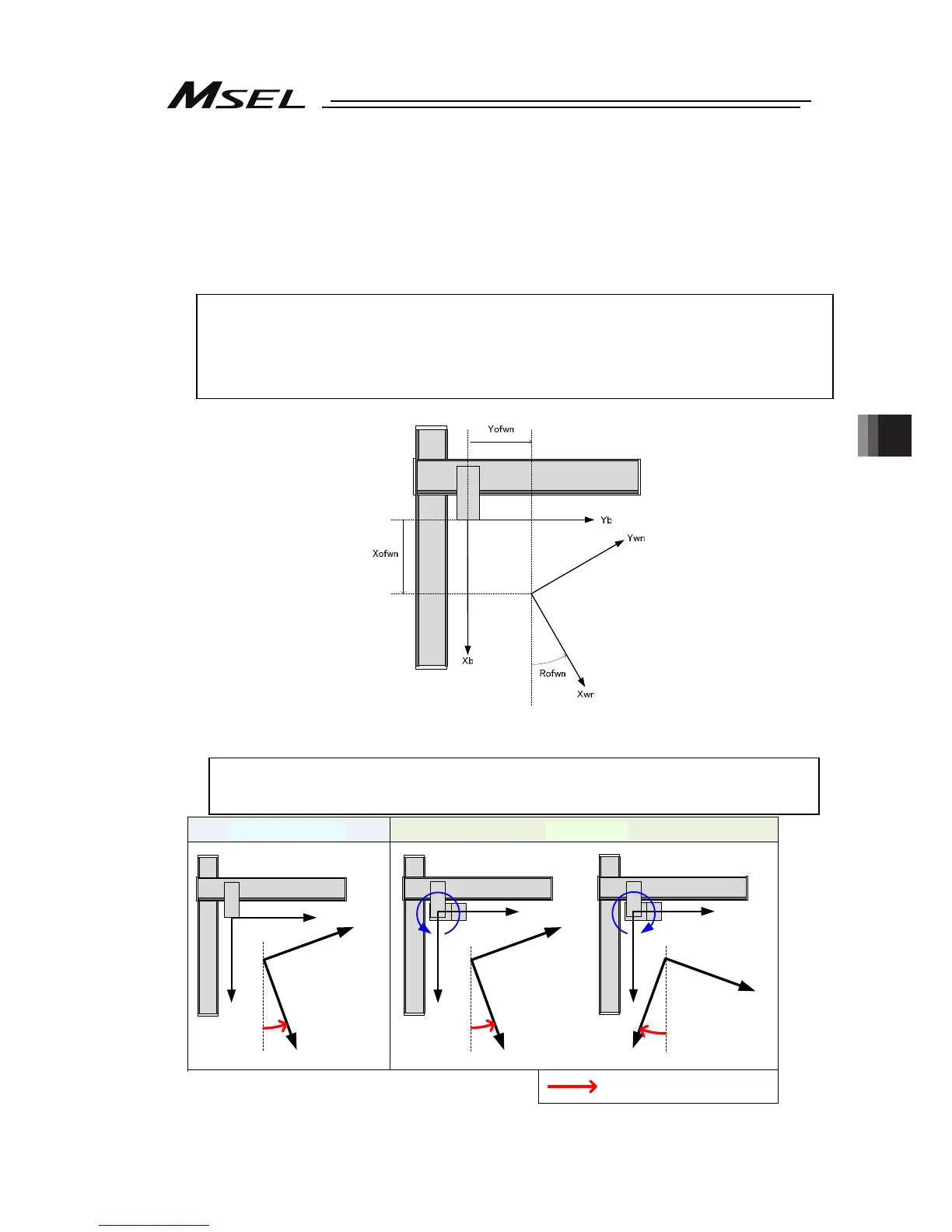
Set the offset of each axis as described below.
The direction of the coordinate system rotation (positive direction of R offset) is defined as
described below by the axis structure of the coordinate system definition unit.
Xb
Yb
Xb
Yb
Rb
Xwn
Ywn
Xwn
Ywn
: Rオフセット量 > 0時の回転方向
R軸なし
R軸あり
Xb
Yb
Rb
Xwn
Ywn
x When no R-axis in constructing axes x x x x x x x Rotating Direction from Xb positive
direction to Yb positive direction
x When there is R-axis in constructing axes x x x Rb + Direction
x X, Y, Z Offset
Distance from the base coordinate system home to the work coordinate system home along
Xb, Yb and Zb directions
x R Offset
Amount of work coordinate system rotation when base coordinate system taken as the
datum
Without R-Axis With R-Axis
R Offset > Direction of Rotation at 0

 Loading...
Loading...








