18
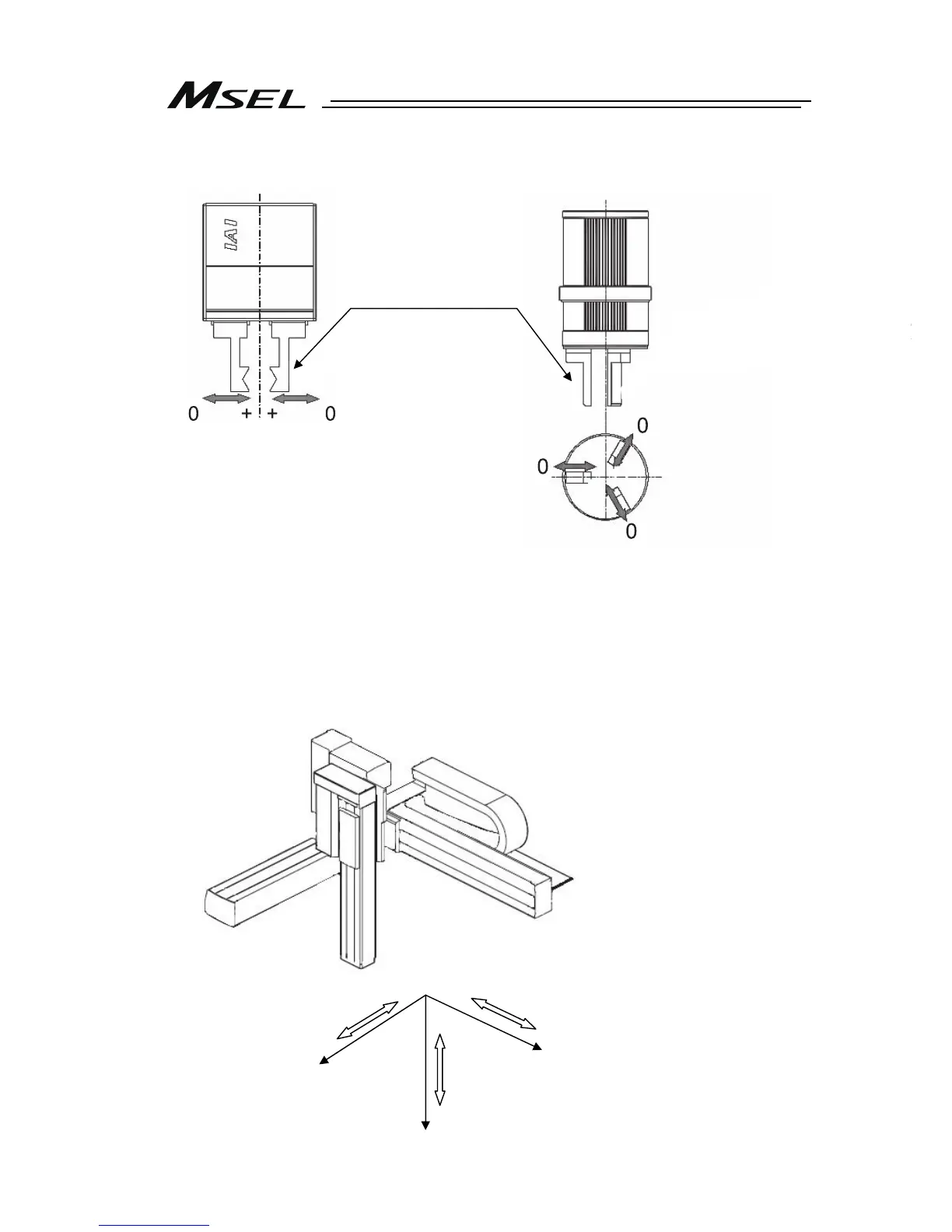
(5) Gripper Type
(3-finger gripper)
Note Finger attachment is not included in the actuator package. Please prepare separately.
(6) Cartesian Robot (dedicated for combination with indicated controller P1 in IK2/IK3 Series)
There are three types of coordinate systems, base coordinate system, work coordinate
system and tool coordinate system.
[Refer to 7.4 Cartesian Axis Coordinate Systems for detail]
+
+
+
Finger attachment (Note)
3
r

 Loading...
Loading...








