19
(7) Horizontal Articulated (SCARA) Robot ⋅ ⋅ IXP Type Dedicated
There are three types of coordinate systems, base coordinate system, work coordinate system
and tool coordinate system.
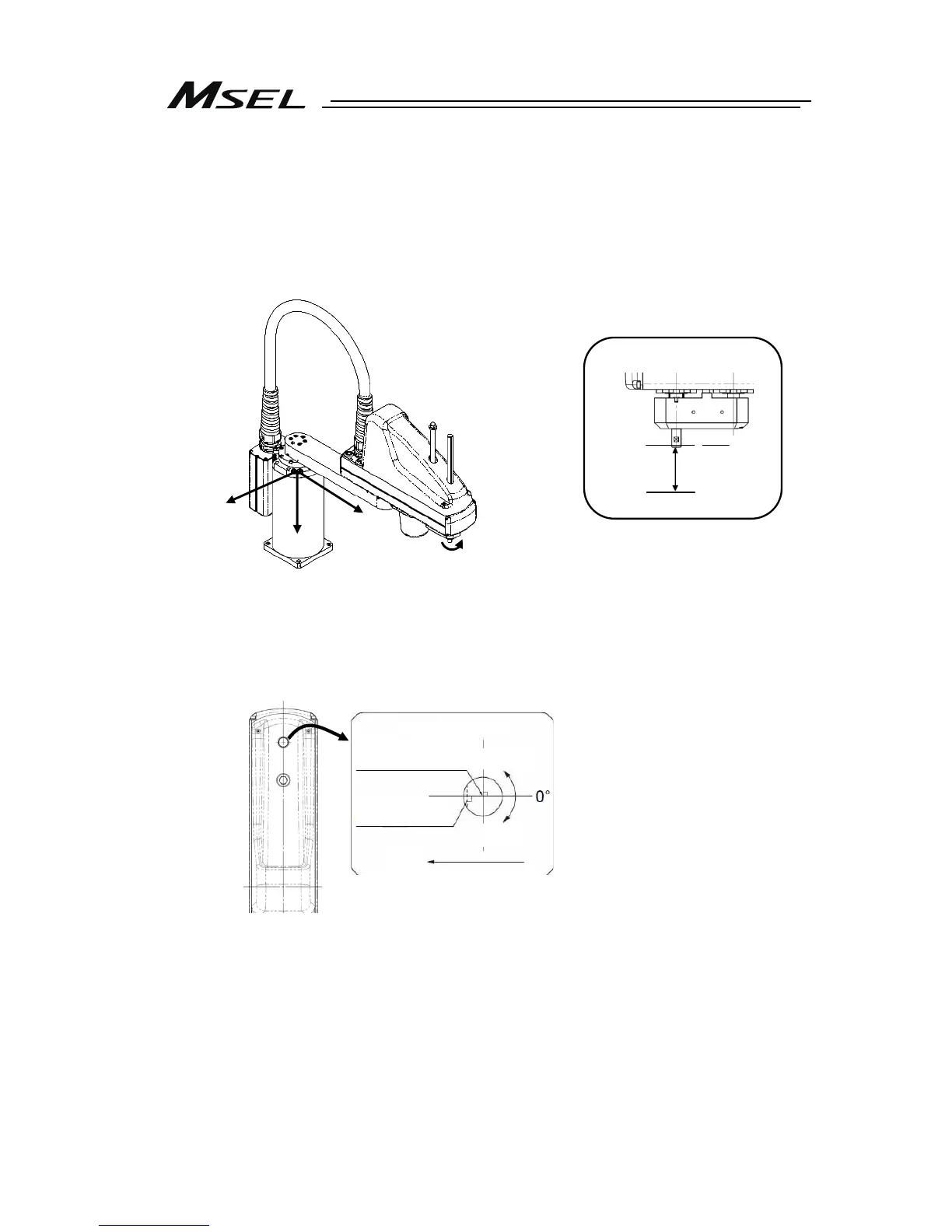
[Base Coordinate System (= Work Coordinate System No. 0)]
It is the 3-dimensional orthogonal coordinates + rotation axis coordinate (dedicated for 4-axis
type) defined in the robot at delivery.
Work coordinate system No. 0 (work coordinate system offset 0) = Base coordinate system.
The origin of X and Y axes is the center of the base (rotation center of the 1
st
arm).
The origin of Z axis is the upper end of the effective stroke on the Z axis.
The origin of R axis is the position that the D-cut surface faces –Xb direction.
X axis of base coordinate system is described as Xb, Y axis as Yb, Z axis as Zb and R axis as
Rb.
Top view of J2 axis
Rb
(For 4
-axis specification)
Xb
Zb
Yb
+Zb
Stroke
Z-axis position
Zb=0
-Zb
-Xb
+Rb
-Rb
Center of tool
attachment face
D-cut surface on

 Loading...
Loading...








