Appendix C
-
165
-
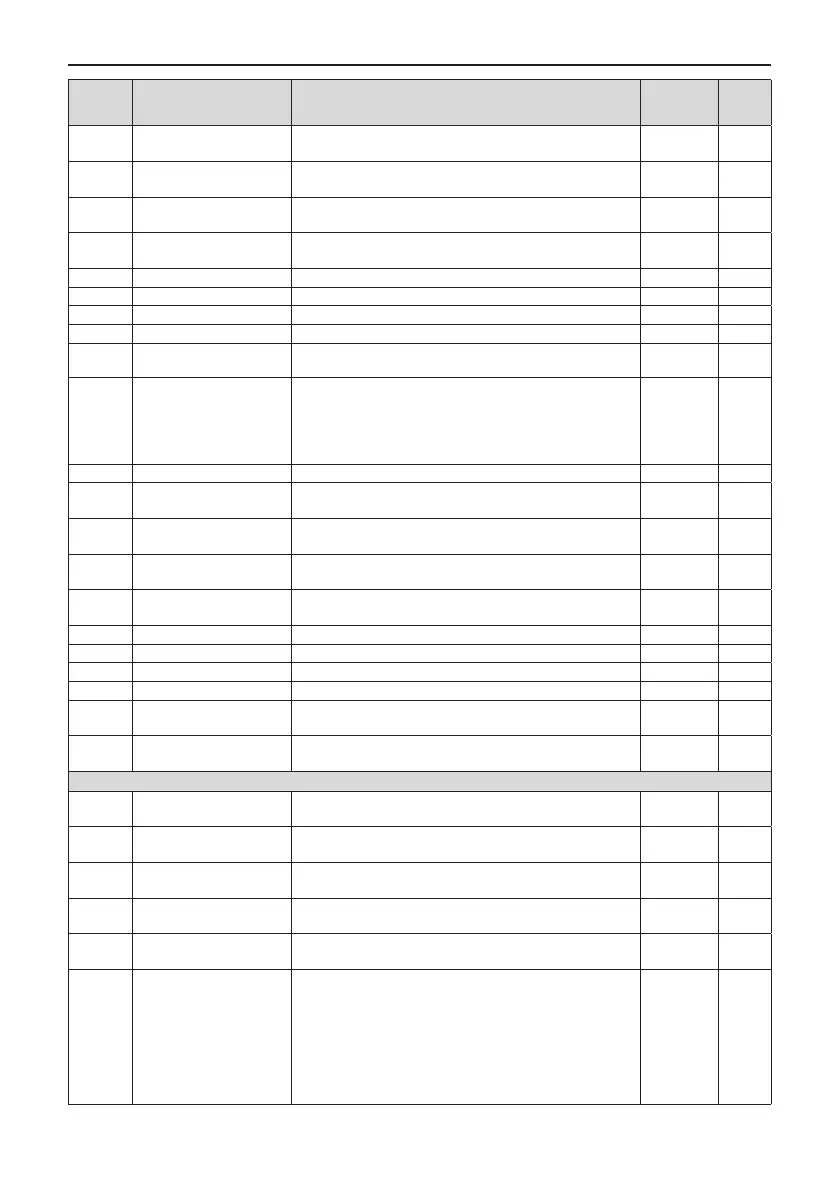
Function
Code
Name Setting Range Default Change
F8-34
Zero current detection
level
0.0% to 300.0%
100.0% corresponds to rated motor current.
5.0%
☆
F8-35
Zero current detection
delay
0.01s to 600.00s 0.10s
☆
F8-36
Output overcurrent
threshold
0.0% (no detection)
0.1% to 300.0% (rated motor current)
200.0%
☆
F8-37
Output overcurrent
detection delay
0.00s to 600.00s 0.00s
☆
F8-38 Detection level of current 1 0.0% to 300.0% (rated motor current) 100.0%
☆
F8-39 Detection width of current 1 0.0% to 300.0% (rated motor current) 0.0%
☆
F8-40 Detection level of current 2 0.0% to 300.0% (rated motor current) 100.0%
☆
F8-41 Detection width of current 2 0.0% to 300.0% (rated motor current) 0.0%
☆
F8-42 Timing function
0: Disabled
1: Enabled
0
★
F8-43
Running time setting
channel
0: Set by F8-44
1: AI1
2: AI2
3: AI3
(100% of analog input corresponds to the value of F8-44)
0
★
F8-44 Running time 0.0Min to 6500.0Min 0.0Min
★
F8-45
AI1 input voltage lower
limit
0.00 V to F8-46 3.10V
☆
F8-46
AI1 input voltage upper
limit
F8-45 to 10.00V 6.80V
☆
F8-47
IGBT temperature
threshold
0°C to 100°C
75
°C
☆
F8-48 Cooling fan working mode
0: Working during drive running
1: Working continuously
0
☆
F8-49 Wakeup frequency Hibernating frequency (F8-51) to max. frequency (F0-10) 0.00 Hz
☆
F8-50 Wakeup delay time 0.0s to 6500.0s 0.0s
☆
F8-51 Hibernating frequency 0.00 Hz to wakeup frequency (F8-49) 0.00 Hz
☆
F8-52 Hibernating delay time 0.0s to 6500.0s 0.0s
☆
F8-53
Running time threshold
this time
0.0 to 6500.0 min 0.0Min
☆
F8-54
Output power correction
coefcient
0.00% to 200.0% 100.0%
☆
Group F9: Fault and Protection
F9-00 Motor overload protection
0: Disabled
1: Enabled
1
☆
F9-01
Motor overload protection
gain
0.20 to 10.00 1.00
☆
F9-02
Motor overload pre-
warning coefcient
50% to 100% 80%
☆
F9-03
Overvoltage protection
gain
0 to 100 30
☆
F9-04
Overvoltage protection
voltage
650 to 800 V 770V
☆
F9-07
Detection of short-circuit
to ground
Units position:Detection of short-circuit to ground upon
power on
0: Disabled
1: Enabled
Tens position: Detection of short-circuit to ground before
running
0: Disabled
1: Enabled
01
☆

 Loading...
Loading...