Technical data
Open and closed loop control
3
3.3
3.3−1
EDSVF9383V EN 4.0−11/2007
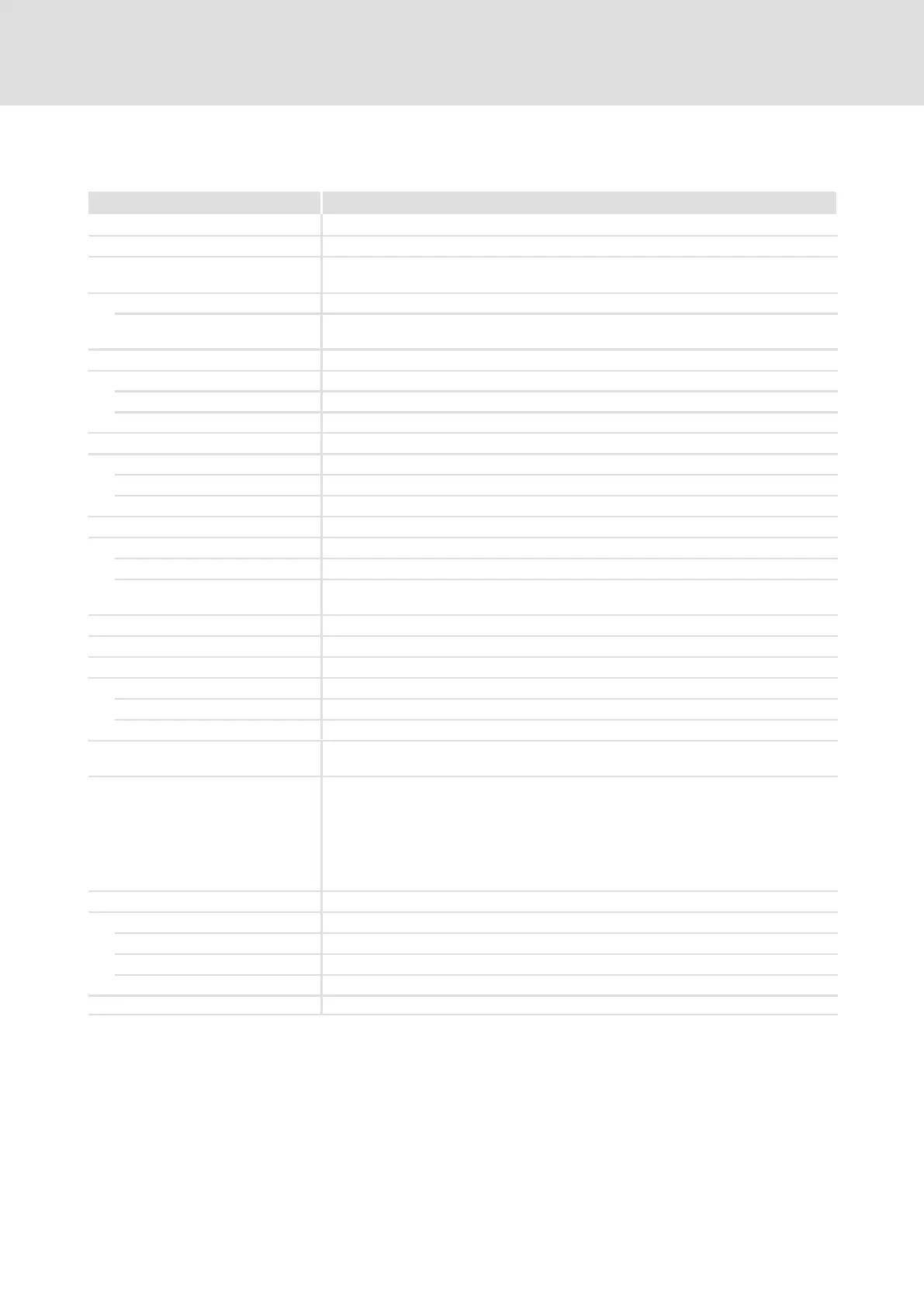
3.3 Open and closed loop control
Field Values
Control methods V/f characteristic control (linear, square), vector control
Switching frequency 1 kHz, 2 kHz or 4 kHz
Torque behaviour in case of vector
control
Maximum torque 1.5 × M
r
for 60 s if rated motor power = rated 9300 vector power
Setting range to 1:10
(1 : 20 with feedback)
in the range of 6 ... 100 % f
r
Speed control without feedback
Min. mechanical motor frequency 1 % f
r
Torque 0 ... M
N
Setting range 1 : 100 relating to f
r
and M
r
Accuracy ± 0.5 % f
N
in the range of 6 ... 100 % f
N
Speed control without feedback
Min. mechanical motor frequency 0.1 % f
N
Torque 0 ... M
N
Setting range 1 : 1000 relating to f
r
and M
r
Accuracy ± 0.1 % of f
r
Output frequency
Field − 300 Hz ... + 300 Hz
Absolute resolution 0.06 Hz
Standardised resolution Parameter data: 0.01 %,
Process data: 0.006 % (= 2
14
)
Digital setpoint selection
Accuracy ± 0.005 Hz (= ± 100 ppm)
Analog setpoint selection
Linearity ± 0.15 % signal level: 5 V or 10 V
Temperature sensitivity ± 0.1 % 0 ... 50 °C
Offset ± 0.1 %
Analog inputs/outputs l 2 inputs (bipolar)
l 2 outputs (bipolar)
Digital inputs/outputs l 6 inputs (freely assignable)
l 1 input for controller inhibit
l 4 outputs freely assignable)
l 1 incremental encoder input (500 kHz, TTL level); Design: 9−pole Sub−D socket
l 1 digital frequency input (500 kHz, TTL level or 200 kHz, HTL level); type: 9−pole Sub−D
socket; can be alternatively used as incremental encoder input (200 kHz, HTL level)
l 1 master frequency output (500 kHz, TTL level); Design: 9−pole Sub−D socket
Cycle times
Digital inputs 1 ms
Digital outputs 1 ms
Analog inputs 1 ms
Analog outputs 1 ms (smoothing time: tt = 2 ms)
Operation in generator mode Integrated brake transistor (optional)
f
r
rated motor frequency
M
r
rated motor torque

 Loading...
Loading...




