2. Product presentation
MiR1000 User Guide (en) 12/2020 - v.1.4 ©Copyright 2019-2020: Mobile Industrial Robots A/S. 20
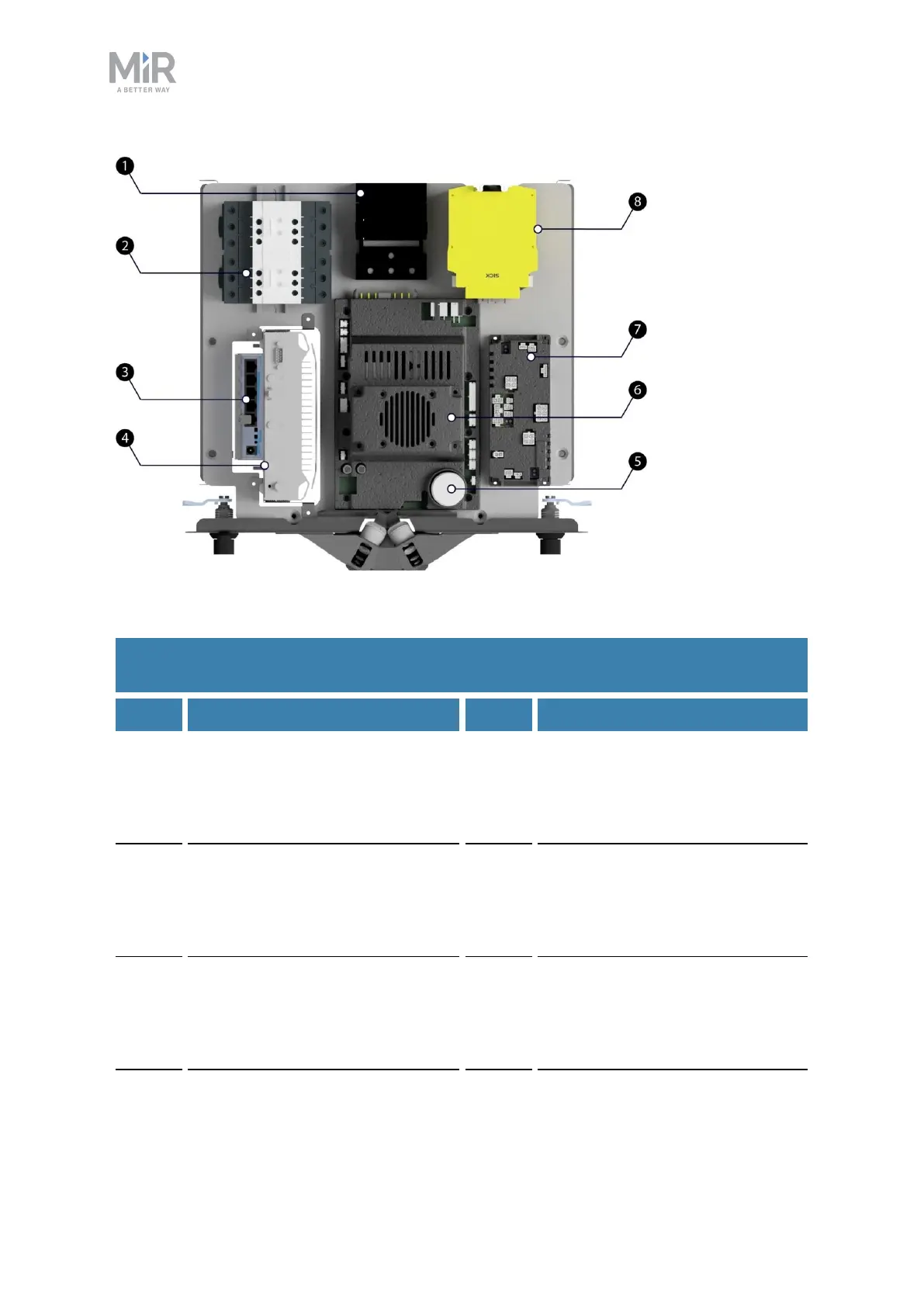
Figure 2.6. Internal parts of the front compartment.
Pos. Description Pos. Description
1 Cable chain: contains a group of
cables that connect with robot
components outside of the front
compartment.
2 Safe Torque Off contactors: cuts
power to the robot's motor when
the robot enters Protective or
Emergency stop.
3 Access point/Router: access point
that broadcasts the robot's WiFi
signal so you can connect to the
robot wirelessly.
4 Robot computer: processes data
from the sensors and controls
the robot's navigation.
5 Loudspeaker:emits sounds
programmed in missions.
6 Power board: controls the power
distribution for the motor
controller, robot computer, and
safety PLC.
Table 2.1.
Identification of internal parts in Figure 2.6