8. Safety-related functions and interfaces
MiR250 Dynamic Integrator Manual (en) 09/2023 - v.2.1 ©Copyright 2020–2023: Mobile Industrial Robots A/S. 94
In interfaces Aand B of the Auxiliary safety functions, pins 3 are used for the input and pins 6 are
used for the output of the System emergency stop function.
Reduced speed
CAUTION
The Reduced speed function is not a safety-rated function. Using this function with a
top module and expecting the robot to enter a safe state when the Reduced speed
function is active can lead to injury of personnel.
l
Do not use the Reduced speed function as a means for safety-related risk
reduction.
The Reduced speed function makes the robot drive at a reduced speed of 0.3 m/s.This is the
same speed used when the robot mutes its Protective fields. Use this function to make the robot
slow down when the top module is active or in an unsafe state, but the robot should not stop
completely.
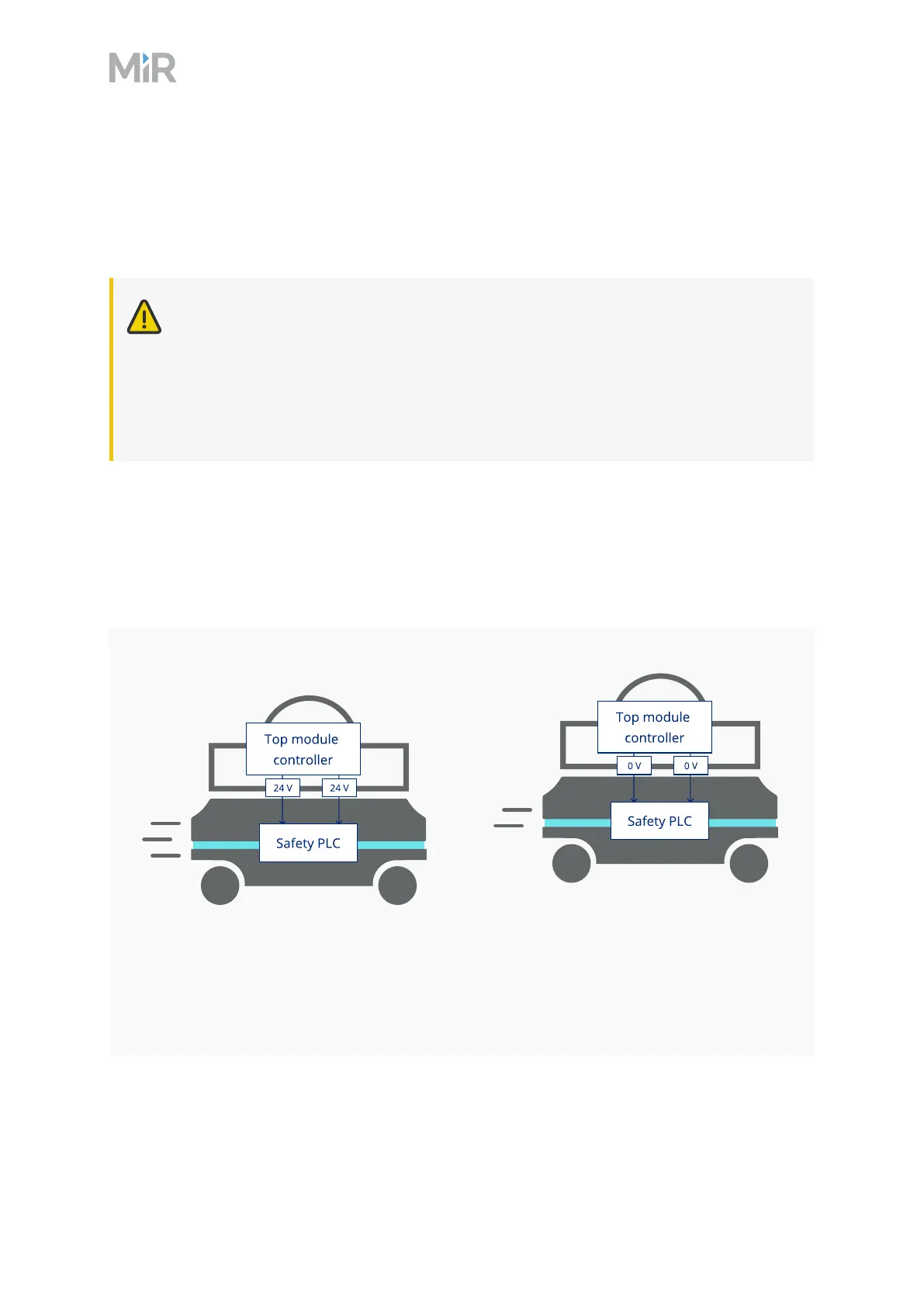
The interface uses two input pins where the robot drives at a reduced speed if either input is 0 V.
Default speed
The robot drives at its default speed only
when both inputs are 24 V.
Reduced speed
If both pins are 0V, the robot drives at
0.3m/s.