8. Safety-related functions and interfaces
MiR250 Dynamic Integrator Manual (en) 09/2023 - v.2.1 ©Copyright 2020–2023: Mobile Industrial Robots A/S. 81
8.2 Safety-related functions
The following functions are implemented in MiR250 Dynamic and are not dependent on a top
module.
Emergency stop
The Emergency stop function ensures that activation of the external Emergency stop box will
trigger the robot into Emergency stop. The Emergency stop circuit goes through the Auxiliary
emergency stop interface and connects to the Emergency stop box.
If you mount a top module to the robot, you can disconnect the Emergency stop box and connect
another Emergency stop button on the top module to the interface instead.
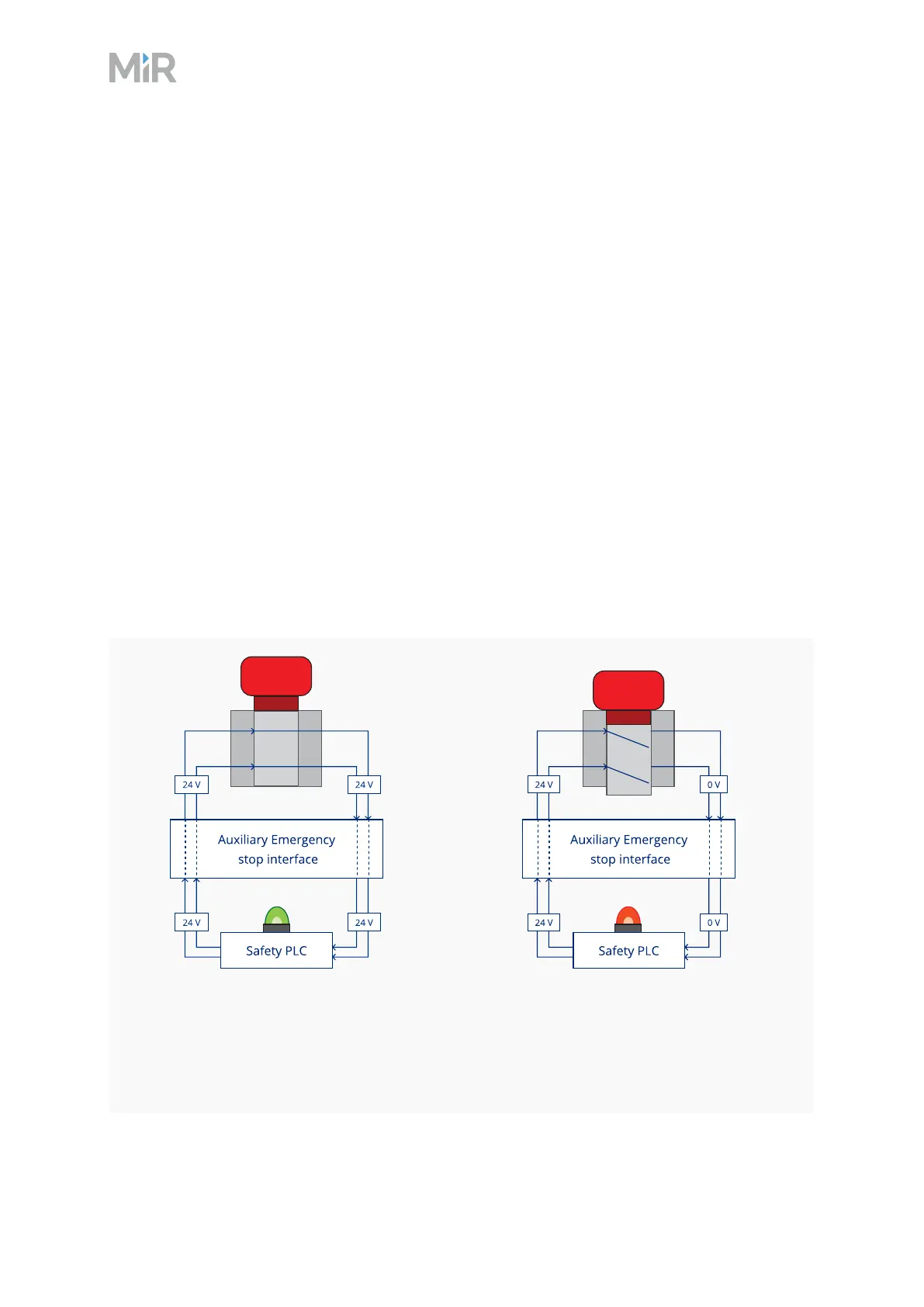
A 24 V signal delivered from the safety PLC-outputs passes through the Emergency stop button
and then continues to the two input pins. When the input pins both receive 24 V, the robot can
operate. The connected Emergency stop button must break the circuit when pressed, meaning
both inputs receive a 0 V signal that will bring the robot into Emergency stop. If the circuit or an
Emergency stop button is installed incorrectly, the input signals are not the same and the robot
enters Protective stop until the circuit is fixed.
Emergency stop button released
If the input pins deliver 24 V to the robot, it
can operate.
Emergency stop button pushed
When you push a connected Emergency
stop button, both pins deliver 0 V, and the
robot enters Emergency stop.