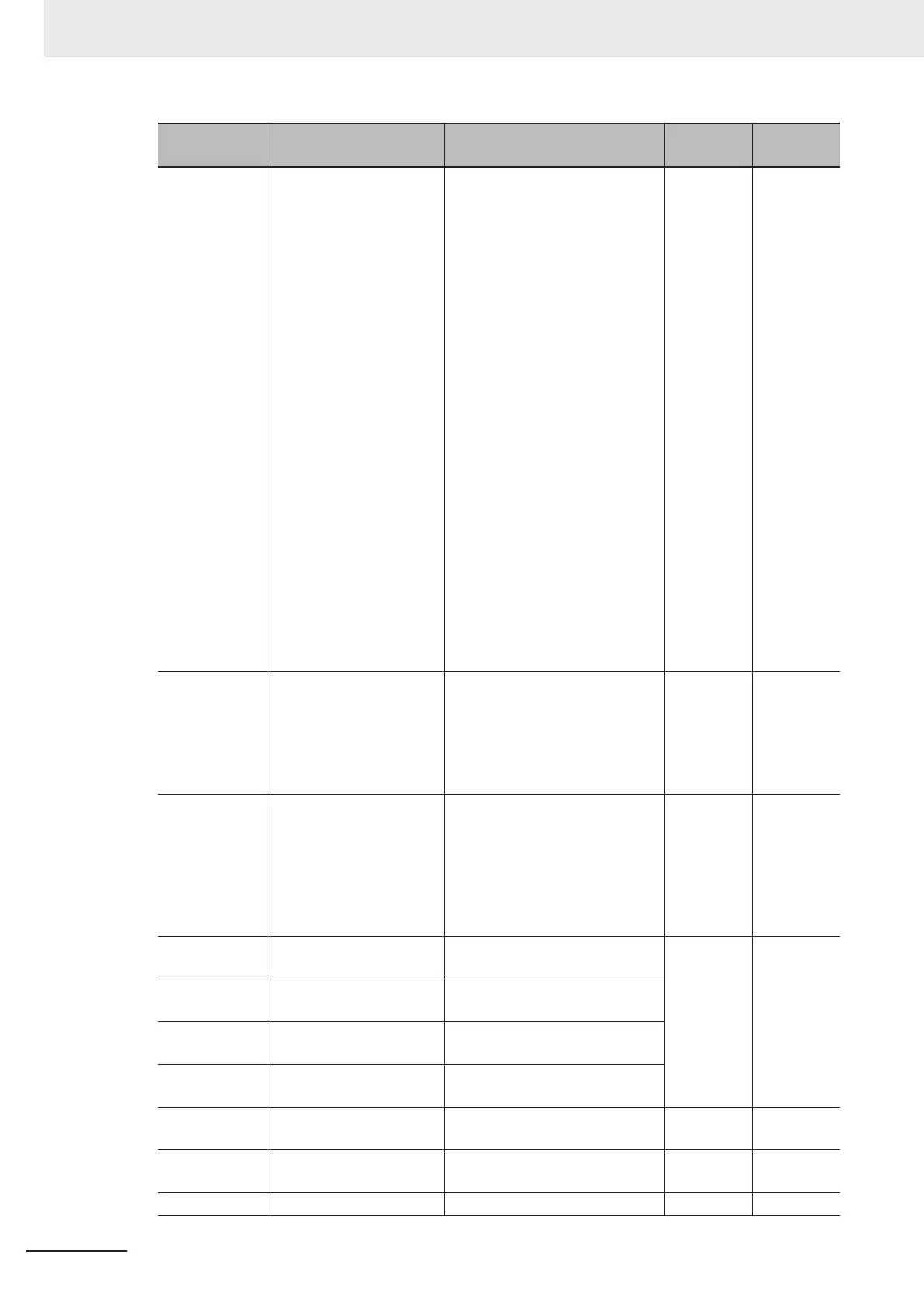
Parameter No. Function name Data
Default da-
ta
Unit
E01 to E05,
E98,
E99
Input Terminal [DI1] Func-
tion Selection to Input Ter-
minal [DI7] Function Se-
lection
78(1078): Speed control parame-
ter selection 1 “MPRM1”
- -
79(1079): Speed control parame-
ter selection 2 “MPRM2”
135(1135): Increment/absolute
position switching “INC/ABS”
136(1
136): Orientation command
“OR
T”
137(1137): Speed/position
switching “SPD”
141(1
141): Current position clear
“PCLR”
142(1142): Current position pre-
set “PSET”
143(1143): Teaching command
“TEACH”
144(1144): Position change com-
mand “POS-SET”
145(1145): Position command
selection 1 “CP1”
146(1146): Position command
selection 2 “CP2”
147(1147): Position command
selection 3 “CP3”
E20 to E21,
E27
Output Terminal [DO1]
Function Selection to Out-
put T
erminal [DO2] Func-
tion Selection(E21), Out-
put Terminal [ROA, ROB]
Function Selection
82(1082): Positioning completed
“POK”
- -
d03, A45, b45,
r45
Speed Control 1 P Pro-
portional Gain, Speed
Control 2 P Proportional
Gain, Speed Control 3 P
Proportional Gain, Speed
Control 4 P Proportional
Gain
0.1 to 200.0 10.00
time
d04
Speed Control 1 I Integral
Time
0.001 to 9.999 s
999: Cancel integral term
0.100 s
A46
Speed Control 2 I Integral
Time
0.001 to 9.999 s
999: Cancel integral term
b46
Speed Control 3 I Integral
Time
0.001 to 9.999 s
999: Disable
r46
Speed Control 4 I Integral
Time
0.001 to 9.999 s
999: Disable
d201
Position Control Feed
Forward Gain
0.00: Disable feed-forward
0.01 to 1.50
0.00 -
d202
Position Control Feed
Forward Filter
0.000 to 5.000 s 0.500
s
d203
Position Loop Gain 1 0.1 to 300.0 1.0 time
6 Vector Control and Applied Functions
6-52
M1 Series Standard Type User's Manual (I669)

 Loading...
Loading...








