Cause of tuning er-
ror
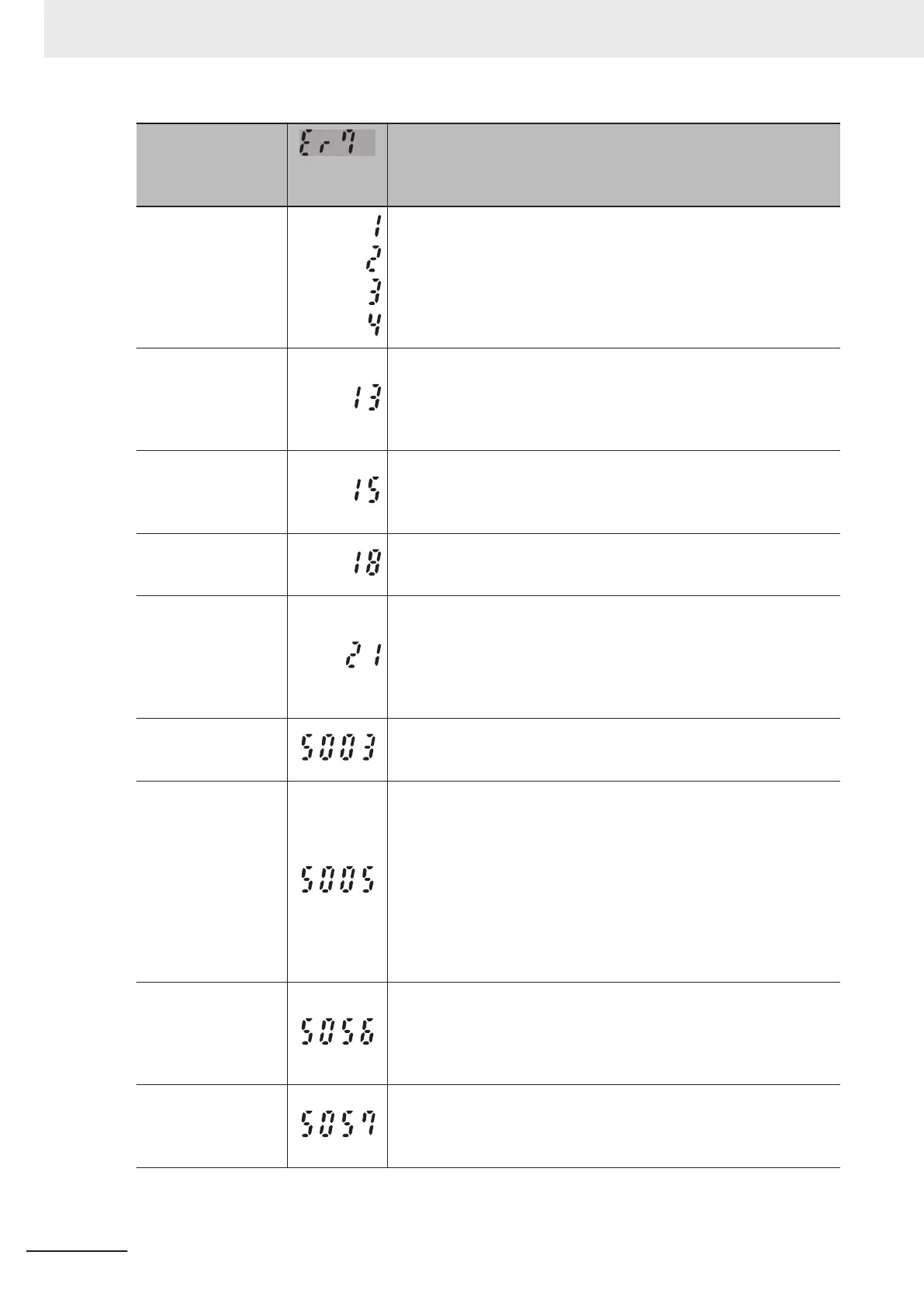
Error sub
code
Cause and countermeasure
Tuning result abnor-
mality
When unbalance between phases or an output phase loss is detected,
or when an open output, etc. causes the tuning result to be an abnor-
mally large or small value
→Check the wiring.
Tuning frequency ab-
normality
(Only when P04 = 2)
When various limit operations occur during tuning, or when a limit is
applied at the maximum output frequency or frequency limiter (upper
limit)
→Change so that the limit value becomes 50% or higher of the base
frequency.
Error occurrence
When an insufficient voltage state has occurred or an alarm has occur-
red
→For details on countermeasures for individual alarms, refer to
9-1 Alarm Display and Remedies on page 9-2.
Acceleration time ex-
ceeded
(Only when P04 = 2)
When 3x the set value of acceleration time in F07 is exceeded for the
output frequency to reach 50% of the base frequency
→Increase the value of F07.
Control method error
Although the motor is rotated for magnetic pole position tuning when
P30 = 0 or 3, when P04 = 1: Tune the motor parameters while stopped
is performed at this setting
When P04 = 5: Tune the motor %R1 and %X while stopped is per-
formed when F42 = 15 is set
→Set to the correct combination.
Parameter
Setting error
When the rated impedance or rated inductance is outside the effective
range
→Check setting of F04, F05 and P03
Inability to calculate
magnetic pole posi-
tion
When P30 = 1 or 3 is set: When the salient pole ratio of the motor in-
ductance is small
When P30 = 2 is set: When there is no magnetic saturation character-
istic of the motor
→When P30 = 1, change P87 to a small value. Note, however, that in
the case of motors that are difficult to magnetically saturate, tuning is
sometimes impossible.
→When P30 = 2 or 3, set P30 = 0, and adjust while increasing F24 in
stages in increments between about 0.5 to 5.0 s until rotation tuning no
longer fails.
Insuf
ficient magnetic
saturation
When the magnetic saturation characteristic of the motor is small and
the magnetic pole position cannot be distinguished
→Increase the value of P87 in stages taking about 120% as the upper
limit. When there is no apparent effect, set P30 = 0 or 3, and set to
about F24 = 0.5 to 5.0 s.
Excessive magnetic
saturation
When the magnetic saturation characteristic of the motor is large, and
a large current flows for distinguishing the magnetic pole position,
which is dangerous
→Set P87 to a small value.
6 Vector Control and Applied Functions
6-70
M1 Series Standard Type User's Manual (I669)

 Loading...
Loading...








