5-55
5 Designing Tasks
NJ-series CPU Unit Software User’s Manual (W501)
5-3 Task Design Methods and I/O Response Times
5
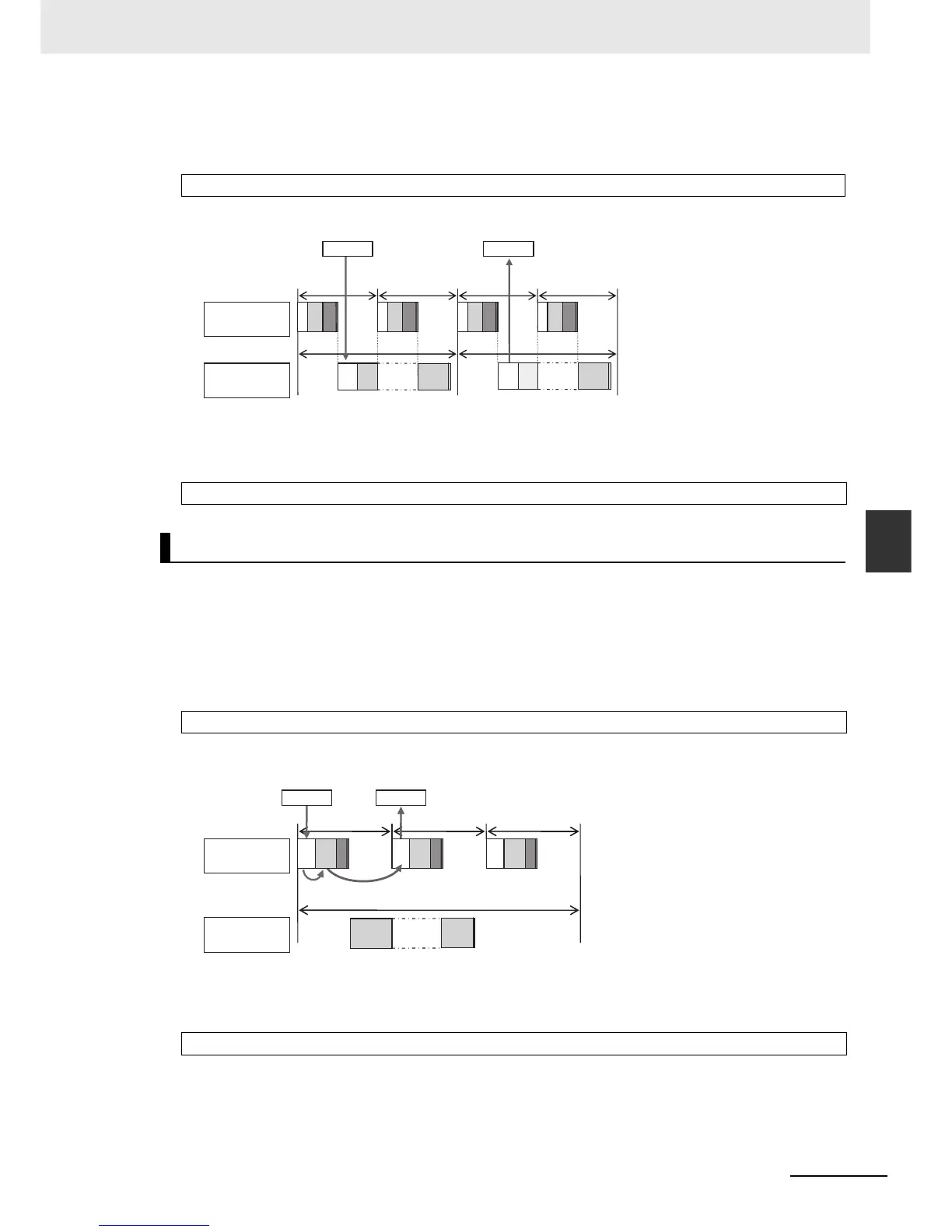
5-3-4 System Input and Output Response Times
Performing Control with the Programs in the Priority-16 Periodic Task
The Controller makes a response in the following I/O response time.
Example: Controlling Unit A and Unit B with the Priority-16 Periodic Task
However, the I/O response time may be as follows depending on the timing of the input from the
Unit.
For EtherCAT slaves, EtherCAT communications with external devices is performed for I/O refreshing in
the primary periodic task.
The I/O response times that include EtherCAT communications times are given below.
Performing Control with the Programs in the Primary Periodic Task
The Controller makes a response in the following I/O response time.
Example: Controlling EtherCAT Input Slave A and EtherCAT Output Slave B with the Primary Peri-
odic Task
However, the I/O response time may be as follows depending on the timing of the input from the
slave.
Minimum I/O response time = Priority-16 periodic task period
Maximum I/O response time = Priority-16 periodic task period 2
Sequence Control with EtherCAT Slaves
Minimum I/O response time = Primary period (= process data communications cycle)
Maximum I/O response time = Primary period (= process data communications cycle) 2
IN
UPGIO
OUT
UPG
IO
MC
UPG
IO
MC
UPG
IO
MC
UPG
IO
MC
UPGIO
Unit B
Primary period
Task period
Note: The above diagram shows only one input and one output.
Primary
periodic task
Priority-16
periodic task
Unit A
UPG
UPG
M
C
IOUPG
M
C
IOUPG
M
C
IO
Slave A
Note: The above diagram shows only one input and one output.
Task period 1 (e.g., t × 3)
Primary
periodic task
Priority-16
periodic task
Process data
communications period =
Primary period (t)
Slave B

 Loading...
Loading...












