5 Designing Tasks
5-56
NJ-series CPU Unit Software User’s Manual (W501)
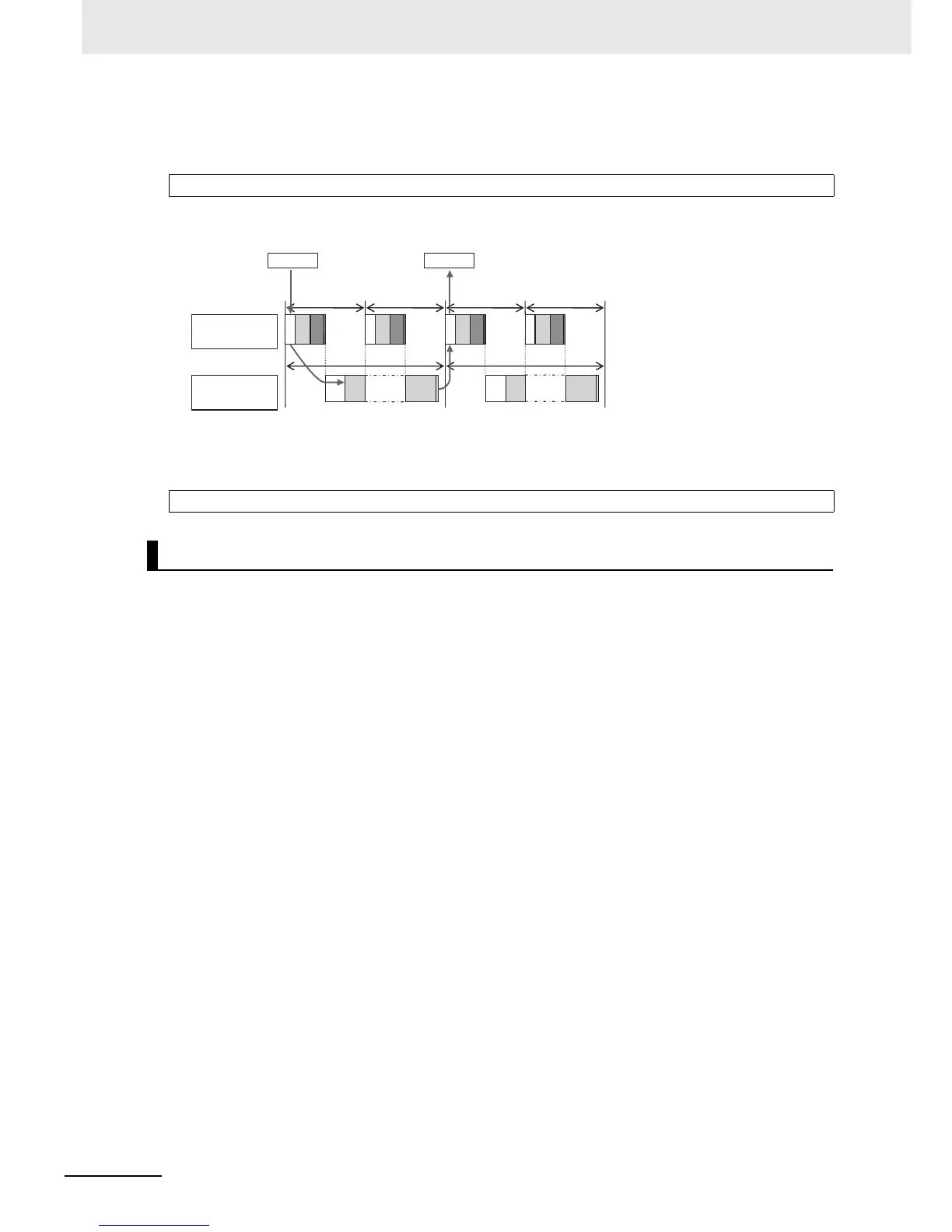
Performing Control with the Programs in the Priority-16 Periodic Task
The Controller makes a response in the following I/O response time.
Example: Controlling EtherCAT Input Slave A and EtherCAT Output Slave B with the Priority-16 Peri-
odic Task
However, the I/O response time may be as follows depending on the timing of the input from the
slave.
Motion control instructions access the Servo Drive and encoder input slaves to which axes are
assigned.
Motion control instructions can be used in the primary periodic task and in a priority-16 periodic
task.
In either case, the motion control instructions are processed in the motion control processing (MC)
section of the primary periodic task.
The I/O response times that include EtherCAT communications times are given below.
I/O response time = Priority-16 periodic task period
Maximum I/O response time = Priority-16 periodic task period 2
Performing Motion Control with Motion Control Instructions
UPGIO
OUT
UPG
IO
MC
UPG
IO
MC
UPG
IO
MC
UPG
IO
MC
UPGIO
IN
Task period
Note: The above diagram shows only one input and one output.
Primary
periodic task
Priority-16
periodic task
Process data
communications cycle
= Primary period (t)
Slave B
Slave A

 Loading...
Loading...












