5 Designing Tasks
5-58
NJ-series CPU Unit Software User’s Manual (W501)
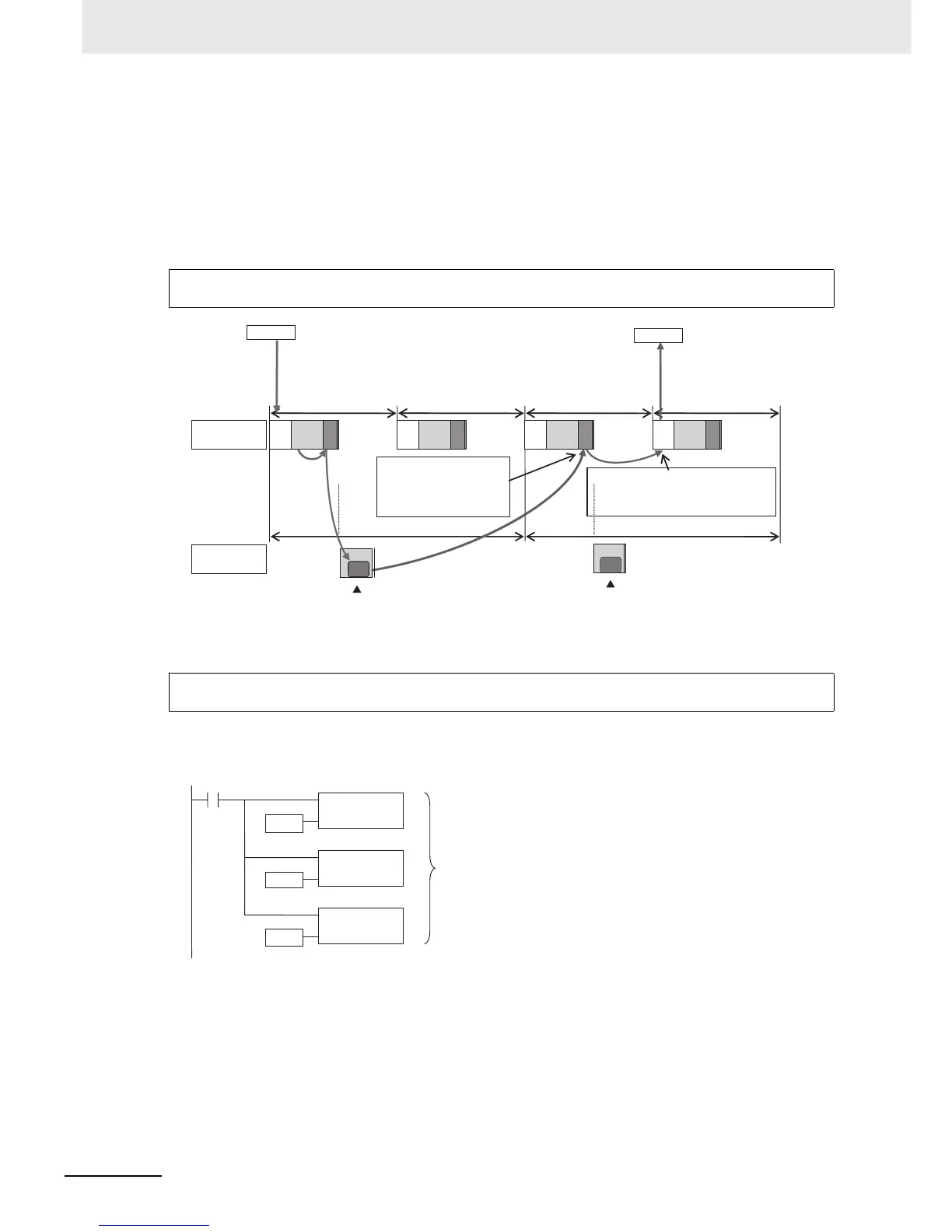
Programming Motion Control Instructions in the Priority-16 Periodic Task
The motion control instructions are processed in the next motion control processing (MC) section of
the primary periodic task after the priority-16 periodic task. The results of processing are output via
EtherCAT communications to the Servo Drive to which the axis is assigned during the I/O refresh
period in the next primary periodic task.
The Controller responds in the following I/O response time regardless of the execution timing of the
motion control instructions.
However, the response time may be as follows depending on the timing of the input from the slave.
If more than one axis is controlled by the programs in the priority-16 periodic task, they can be
started at the same time. (This is the same as controlling more than one axis in the primary periodic
task.)
Minimum I/O response time = Priority-16 periodic task period +
Primary period (= process data communications cycle)
Maximum I/O response time = Priority-16 periodic task period +
Primary period (= process data communications cycle) 2
MC
IO
UPG
UPG
IN
MC
IO
UPG
MC
IO
UPG
MC
IO
UPG
UPG
MC_
MC_
Note: The above diagram shows only one input and one output.
Motion control instructions executed.
Motion control instructions executed.
Priority-16
periodic task
Task period (e.g., t × 2)
Task period (e.g., t × 2)
Processing is performed in
the motion control processing
(MC) section of the next
primary periodic task.
Commands to Servo A are sent via
EtherCAT communications when I/O
is refreshed in the next primary period.
Primary
periodic task
Process data
communications cycle
= Primary period (t)
Execution command
Servo A
Slave A
Start commands
are output at the
same time.
Motion control
instructions
Axis C
Motion control
instructions
Axis B
Motion control
instructions
Axis A

 Loading...
Loading...












