6-43
6
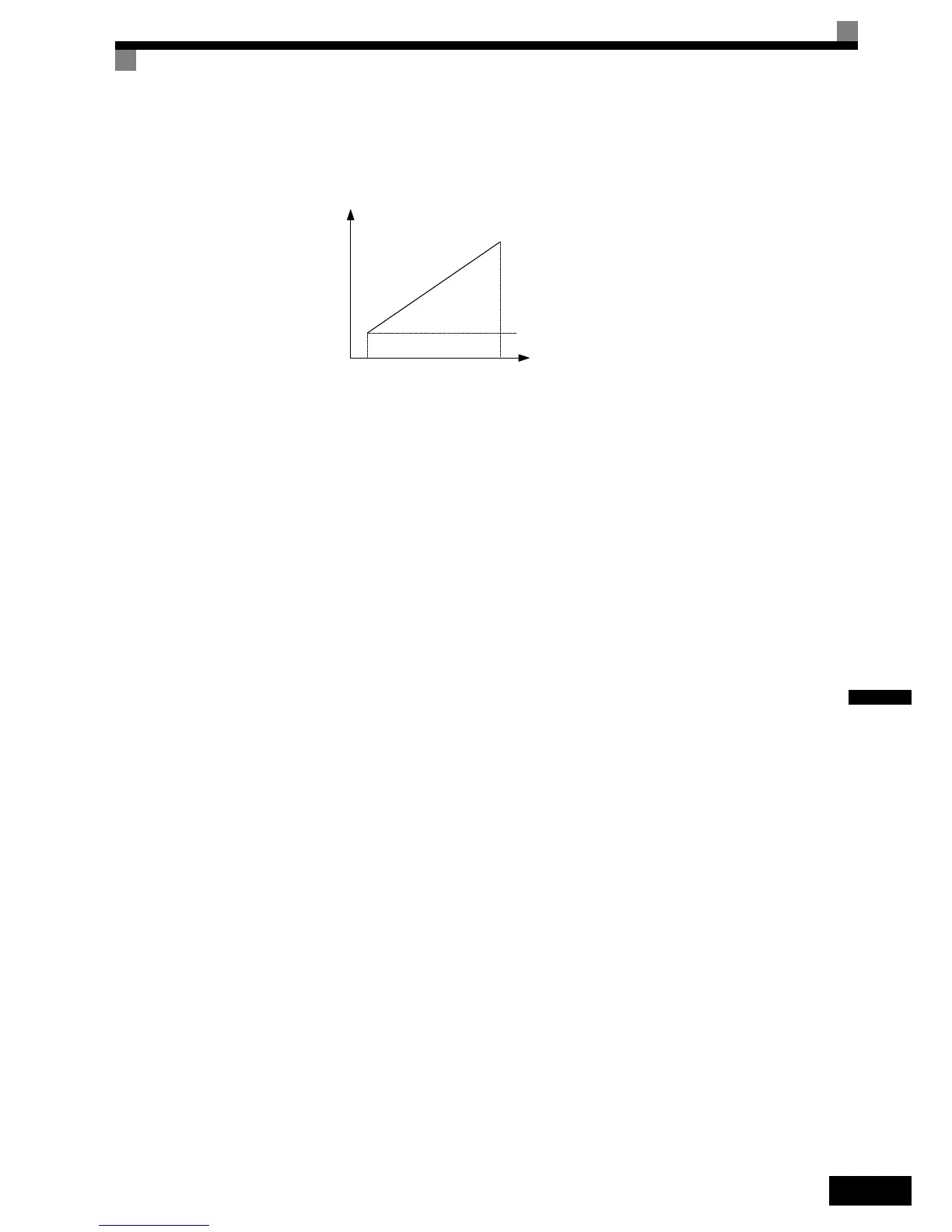
ASR Gain and Integral Time Adjustments for V/f control with PG
When using V/f control with PG, set the ASR gain and the integral time at E1-09 (minimum output frequency)
and E1-04 (maximum output frequency). See Fig 6.46 for details.
Fig 6.46 Speed Control Gain Integral Time Adjustment for V/f Control with PG
Gain Adjustments at Minimum Output Frequency (C5-03 and C5-04)
Operate the motor at the minimum output frequency. Increase C5-03 (ASR proportional gain 2) and decrease
C5-04 (ASR integral time 2) as long as no oscillation occurs.
Monitor the Inverter's output current and verify that it is less than 50% of the Inverter rated current. If the out-
put current exceeds 50% of the Inverter's rated current, decrease C5-03 and increase C5-04.
Gain Adjustments at Maximum Output Frequency (C5-01 and C5-02)
Operate the motor at the maximum output frequency. Increase C5-01 (ASR proportional gain 1) and decrease
C5-02 (ASR integral time 1) as long as no oscillation occurs.
Fine Adjustments
When an even finer ASR adjustment is required, adjust the gain while observing the motor speed. The adjust-
ment procedure is the same as for vector control.
Using Integral Control during Acceleration and Deceleration (F1-07)
Enable integral operation during acceleration and deceleration (by setting F1-07 to 1) if the motor speed has to
follow the frequency reference closely during acceleration and deceleration. Reduce the setting of C5-01 if
overshooting occurs during acceleration, and reduce the setting of C5-03 and increase the setting of C5-04 if
undershooting occurs when stopping. If overshooting and undershooting cannot be eliminated by adjusting
only the gain and integral time, reduce the ASR limit value (C5-05).
P,I
0
Motor Speed
P=C5-03
I=C5-04
P=C5-01
I=C5-02
E1-09
Min. Output
Frequency
E1-04
Max. Output
Frequency

 Loading...
Loading...







