Function Parameters 9-3
AC10 Inverter
F114 First Acceleration Time (s)
Mfr’s value:
subject to inverter
model
F115 First Deceleration Time (s)
F116 Second Acceleration Time (s)
F117 Second Deceleration Time (s)
F277 Third Acceleration Time (S)
F278 Third Deceleration Time (S)
F279 Fourth Acceleration Time (S)
F280 Fourth Deceleration Time (S)
F119 is used to set the reference of setting acceleration/deceleration time.
The Acceleration/Deceleration time can be chosen by multifunction digital input terminals
F316~F323 and connecting DI terminal with CM terminal. Please refer to the instructions of multi-
functional input terminals.
Note: When Flycatching is working, acceleration/deceleration time, min frequency and target
frequency are invalid. After Flycatching is finished, inverter will run to target frequency according
to acceleration/deceleration time.
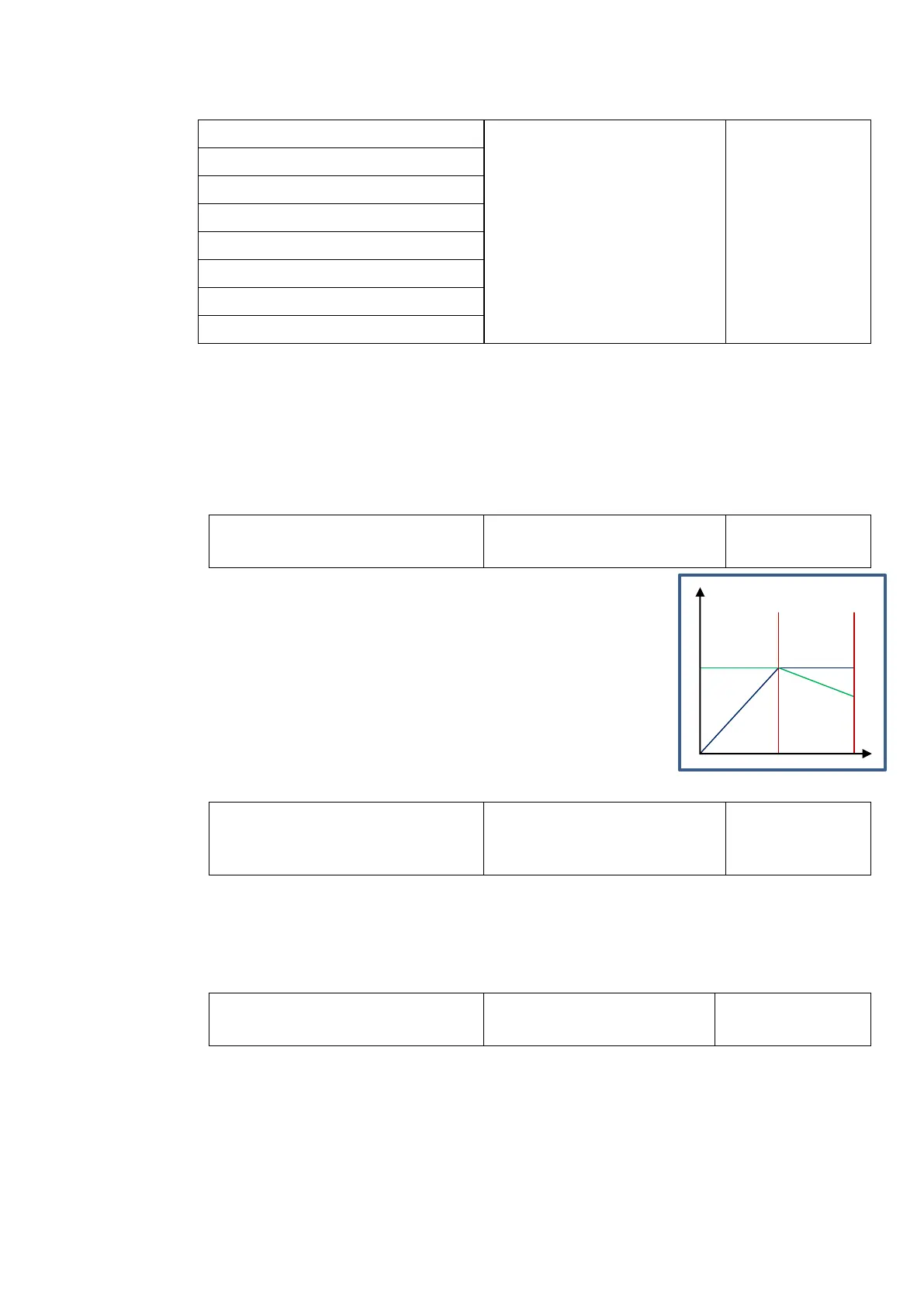
Base frequency is the frequency required to run the motor
nameplate base speed (Typically 50Hz or 60Hz). Motor
nameplate base speed (F805) = [(Base frequency x 120) / poles]
– slip.
When running frequency is lower than this value, inverter has
constant-torque output. When running frequency exceeds this
value, inverter has constant-power output (i.e. Hp = SPEED x
TORQUE).
Note: During the process of Flycatching, base frequency is
ignored.
F119 The reference of setting
accel/decel time
When F119=0, acceleration/deceleration time means the time for inverter to accelerate/
decelerate from 0Hz (50Hz) to 50Hz (0Hz).
When F119=1, acceleration/deceleration time means the time for inverter to accelerate/
decelerate from 0Hz (max frequency) to max frequency (0Hz).
F120 Forward / Reverse
Switchover dead-Time (s)
Within “forward/reverse switchover dead-time”, this latency time will be cancelled and the
inverter will switch to run in the other direction immediately upon receiving “stop” signal. This
function is suitable for all the speed control modes except automatic cycle operation.
This function can ease the current impact in the process of direction switchover.
Note: During the process of Flycatching. F120 is invalid. After Flycatching is finished, this
function code is valid.

 Loading...
Loading...







