User Manual
E727T0005, valid for E-727
BRO, 2019-06-28
Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany Page 170 / 240
Phone +49 721 4846-0, Fax +49 721 4846-1019, Email info@pi.ws, www.pi.ws
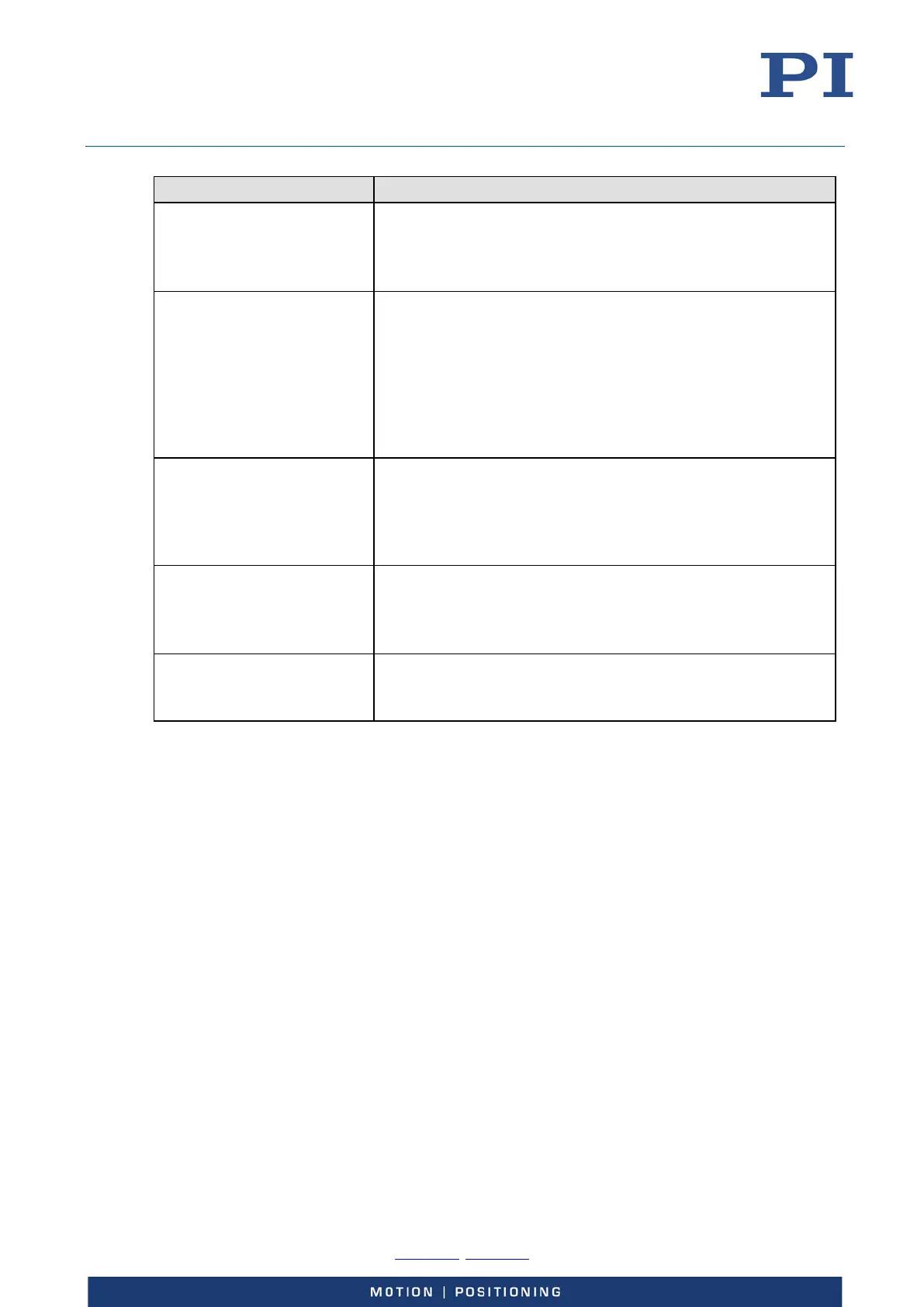
State of drive state machine
Transition 3 into this state can only be requested by the
EtherCAT master.
Drive function disabled.
Target and set-point values are ignored.
OPERATION ENABLED
Transition 4 into this state can only be requested by the
EtherCAT master.
If the EtherCAT master sets bits 0, 1 and 3 simultaneously in the
control word, the drive can pass from Ready to switch on via
Switched on to Operation enabled with one control command.
Drive function enabled, drive is ready to follow target and set-
point values.
Target and set-point values are processed.
QUICK STOP ACTIVE
Transition 11 into this state, and transitions 12 and 16 out of this
state can only be requested by the EtherCAT master.
Drive function enabled, drive is ready to follow target and set-
point values.
Target and set-point values are ignored.
FAULT REACTION ACTIVE
An error occured.
Drive function enabled, drive is ready to follow target and set-
point values.
Target and set-point values are ignored.
FAULT An error occured, and the Fault reaction active state has been
passed.
Drive function disabled.
All axes of the E-727 are in the Switch on disabled state after switching on or rebooting the E-727.
In order for the EtherCAT master to be able to initiate a transition to the Ready to switch on state,
the following conditions must be met by the axes:
The AutoZero procedure must be finished (takes about 3 seconds).
No macro is running.
The axis definition must allow closed-loop operation, i.e., at least one sensor and one
piezo amplifier must be assigned via the input and output matrices of the E-727 (p. 29
and p. 34). Note: Normally, the matrices are set properly by PI before delivery.
No wave generator is running.
No analog control input is enabled.
The E-727 does not provide information on the status of the power-on/reboot sequence (p. 166)
and the above listed procedures / control sources via the EtherCAT interface. For that reason,
sufficient waiting time is required before a state transition to Ready to switch on is initiated.
A transition to the Operation Enabled state switches the axis to closed-loop control (p. 30). The
axis remains in closed-loop operation until it is switched to open-loop control due to overheating
(p. 173) or by an SVO command sent via TCP/IP or USB interface.