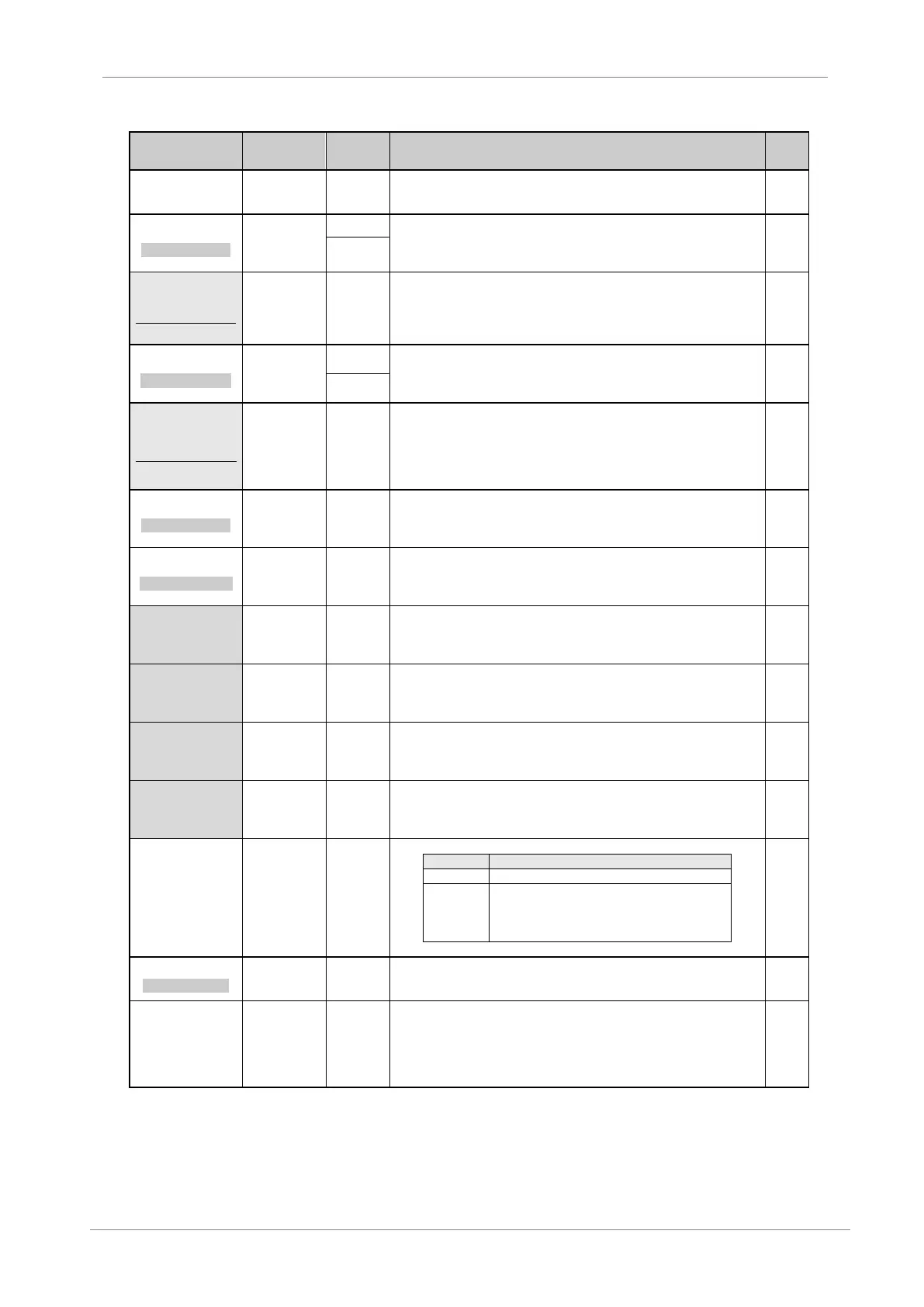
DESCRIPTION OF PROGRAMMING PARAMETERS
Parameter /
Default Value
G4.2.3 /
Analogue Input 1
format
It allows configuration of the analogue input 1 format for either a voltage or current
signal. Set according to the sensor that will be used.
4 INmin1=+0V
AIN1 LOW RANGE
G4.2.4 /
Minimum range
of Analogue
Input 1
-10V to G4.2.6
+0mA to
G4.2.6
It determines the minimum voltage or current value for analogue input 1. Set
according to the characteristics of the sensor that will be connected.
5 Smi1=+0.0l/s
[3]
SENS1 LOW RANGE
G4.2.5 /
Minimum range
of sensor 1
-3200 to
G4.2.7
Engineering
units
It sets the minimum units value of the sensor connected to analogue input 1. This
value should also correspond to the minimum voltage or current level of the
sensor set in 'G4.2.4 INmin1'.
Note: This value should be checked if the units are changed in 'G4.2.2 SENSOR
1'. It will be set to operate in open loop and close loop.
6 INmax1=+10V
AIN1 HIGH RANGE
G4.2.6 /
Maximum range
of Analogue
Input 1
G4.2.4 to
+10V
G4.2.4 to
+20mA
It determines the maximum voltage or current value for analogue input 1. Set
according to the characteristics of the sensor that will be connected.
7 Sma1=+10.0l/s
[3]
SENS1 HIGH RANGE
G4.2.7 /
Maximum range
of sensor 1
G4.2.5 to
+3200
Engineering
units
It sets the maximum units value of the sensor connected to analogue input 1. This
value should also correspond to the maximum voltage or current level of the
sensor set in 'G4.2.6 INmax1'.
Note: This value should be checked if the units are changed in 'G4.2.2 SENSOR
1'. For this, it is necessary to set this value in open loop and close loop
configurations.
8 SPD LO1=+0%
SPD LO RNG AIN1
G4.2.8 / Speed
for the minimum
range of
Analogue Input 1
It allows scaling of the speed reference to correspond with the minimum range of
the analogue input 1 as set in 'G4.2.4 INmin1'.
The value is a percentage of the motor rated speed.
9 SPD HI1=+100%
SPD HIG RNG AIN1
G4.2.9 / Speed
for the maximum
range Analogue
Input 1
It allows scaling of the speed reference to correspond with the maximum range of
the analogue input 1 as set in 'G4.2.6 INmax1'.
The value is a percentage of the motor rated speed.
G4.2.10 /
Minimum
operating range
of sensor
-3200 to
G4.2.12
Engineering
units
To set the minimum operating range, if the real operating range is different than
the range of the sensor which will be used as sensor in open loop. It corresponds
with the voltage or current level set in ‘G4.2.4INmin1’. This parameter should be
configured to operate with sensor in open loop.
G4.2.11 /
Minimum speed
range for sensor
in open loop
It allows setting the minimum speed range corresponding to the minimum sensor
range set in ‘G4.2.10 FB1’, when the sensor will be used in open loop.
The value is a percentage of the motor rated speed.
G4.2.12 /
Maximum
operating range
of sensor
G4.2.10 to
+3200
Engineering
units
To set the maximum operating range, if the real operating range is different than
the range of the sensor which will be used as sensor in open loop. It corresponds
with the voltage or current level set in ‘G4.2.6INmin1’. This parameter should be
configured to operate with sensor in open loop.
G4.2.13 /
Maximum speed
range for sensor
in open loop
It allows setting the maximum speed range corresponding to the maximum sensor
range set in ‘G4.2.12 FA1’, when the sensor will be used in open loop.
The value is a percentage of the motor rated speed.
G4.2.14 /
Protection for
Analogue Input 1
loss
To set the drive stop mode when a loss of the analogue input 1 signal occurs.
When the analogue input level decreases down
to zero value, sensor will be considered damaged
and the drive will stop generating a fault 'F42
AIN1 LOSS'.
15 1_Z BAND=OFF
AIN1 ZERO BAND
G4.2.15 / Zero
band filter for
Analogue Input 1
Filtering of analogue input 1 signal. Setting this value we can filter analogue input
1 to avoid possible electrical noise preventing the analogue reading a zero value.
16 FILTER1=OFF
AIN1 STABIL FILT
G4.2.16 / Low
Pass filter for
Analogue Input 1
It allows filtering the Analogue Input 1 signal. Setting the value of this time
constant we can eliminate possible instabilities in the value of the same ones due
to noise, wiring faults, etc.
Note: When applying a Low Pass filter to any analogue signal, a delay time in the
own signal is generated. This delay time is the value of the configured time
constant approximately.
[3]
Available only when 'G4.2.1 SENSOR 1 = Y'.