DESCRIPTION OF PROGRAMMING PARAMETERS
4.3. Group 3 – G3: References
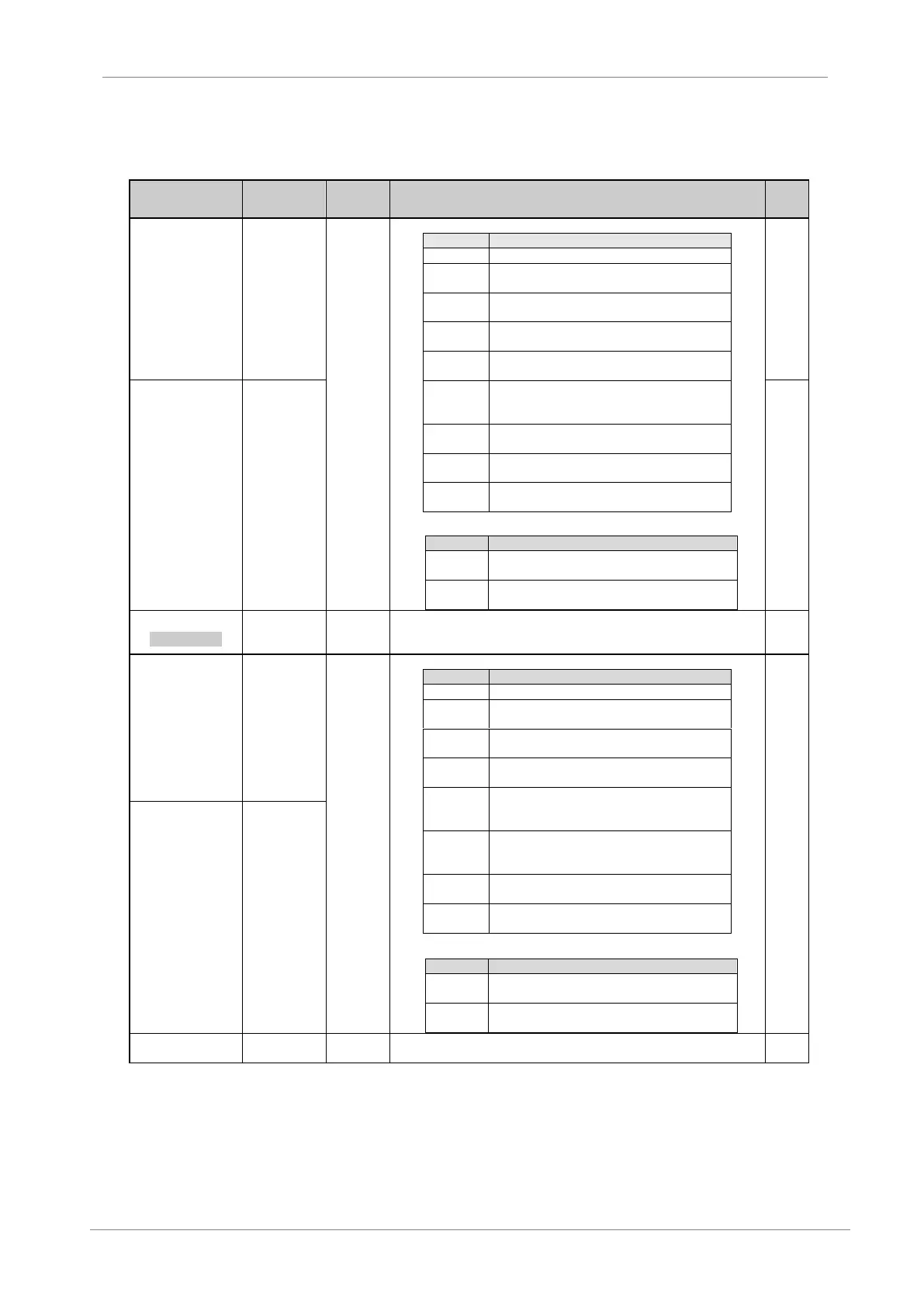
Parameter /
Default Value
G3.1 / Reference
source 1 of
speed
NONE
AI1
AI2
AI1+AI2
FIB_1
LOCAL
MREF
PMOT
PID
COMMS
FIB_2
It allows selecting the source 1 or 2 for the speed reference.
Reference source 1 has not been selected.
Reference will be introduced through the
Analogue Input 1.
Reference will be introduced through the
Analogue Input 2.
Reference will be the sum of the signals
introduced through the Analogue Inputs 1 and 2.
Reference will be given by keypad and will be set
in ‘G3.3’Local Speed Reference’.
Multi-Reference. Different references activated by
the digital inputs. It will be necessary to configure
the digital inputs. See ‘S4.1 Digital Inputs’.
Motorized potentiometer with or without reference
memory.
It will take as reference the value set in the
parameters of the PID function.
The reference will be introduced through the
communications.
If the parameter G20.0.1 is set as OFC, the following options are shown too.
The drive speed reference will be the same as the
master current speed reference.
The drive speed reference will be the master motor
current speed (%)
G3.2 / Reference
source 2 of
speed
3 LOCAL SP=+100%
LOCAL SPEED
G3.3 / Local
Speed
Reference
Allows the user to set the motor speed value if the reference source for speed has
been set to ‘LOCAL’.
G3.4 / Torque
Source reference
1
NONE
AI1
AI2
AI1+AI2
FIB_1
LOCAL
MREF
PID
COMMS
FIB_2
Allows to select supply 1 or supply 2 of the torque reference.
The supply reference 1 has not been selected.
The reference will be introduced through the
analogue input 1.
The reference will be introduced through the
analogue input 2.
The reference will be the addition of the signals
introduced through the Analogue Inputs 1 and 2.
The reference will be introduced through
keyboard and will be adjusted in G3.3 “Local
Speed Reference”.
Multi-reference. Different activated references by
digital inputs. Digital inputs have to be configured.
See S4.1 Digital Inputs.
Will assume as reference the value adjusted in
the parameters of the PID.
The reference will be introduced through the
communications.
If the parameter G20.0.1 is set as OFC, the following options are shown too.
The drive torque reference will be the same as the
master current torque reference
The drive torque reference will be the master motor
current torque (%)
G3.5 / Torque
supply reference
2
G3.6/ Local
Torque reference
Allows the user to set the torque value of the motor if the torque reference source
has been adjusted to “LOCAL”.