ORBIT 16
I) Sensor
It detects that the rotating ring is stopped.
L) Photocell
It detects that the inlet pressure roller is in down position and sends a first descent command to the
outlet pressure roller.
M) Sensor
It detects any coating breakage.
N) Sensor
Detects the clamp in the “forward” position.
O) Sensor
It detects the blade in “forward” position.
P) Sensor
It detects the blade in “backward” position.
Q) Sensor (Only with L=500 reel).
It detects the forward most position for coating locking.
Important
For further details see the electrical diagram.
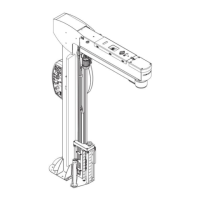
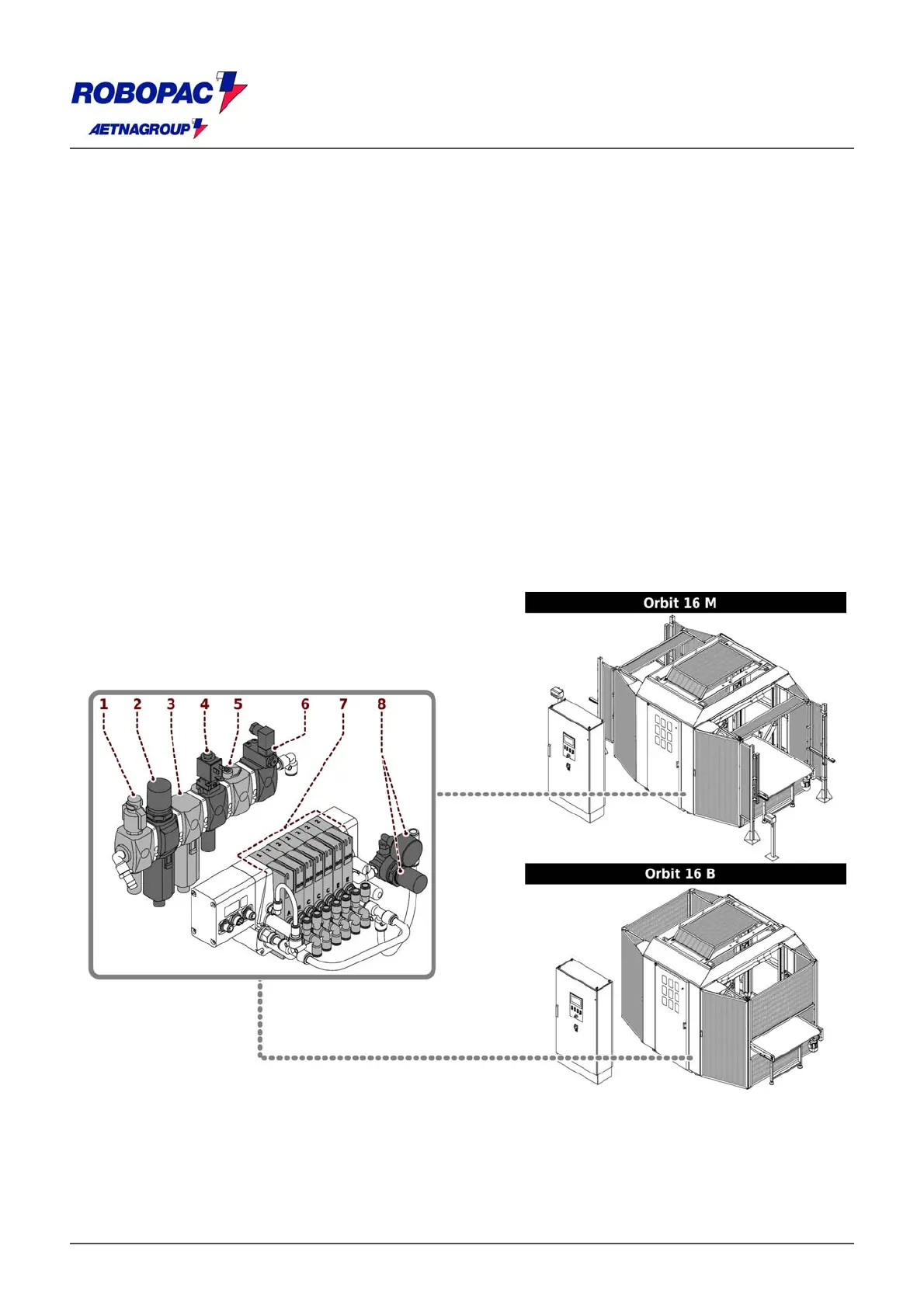
3.5. PNEUMATIC DEVICE DESCRIPTION
he fi
ure shows the
ositionin
of the devices on board of the machine.
1) Tap
to eliminate pneumatic pressure inside the machine.
2) Pressure regulator with filter and pressure gauge
to adjust general pressure of the pneumatic plant.
Turn knob to change the pressure values indicated on the pressure gauge.
3) Filter
For further air filtering.