Libraries
9.5 USS library
S7-200 SMART
System Manual, V2.3, 07/2017, A5E03822230-AF
555
The "EN" bit must be on to enable transmission of a request, and should remain on until the
"Done" bit is set, signaling completion of the process. For example, a USS_RPM_x request
is transmitted to the drive on each scan when the "XMT_REQ" input is on. Therefore, the
"XMT_REQ" input should be pulsed on through an edge detection element which causes
one request to be transmitted for each positive transition of the "EN" input.
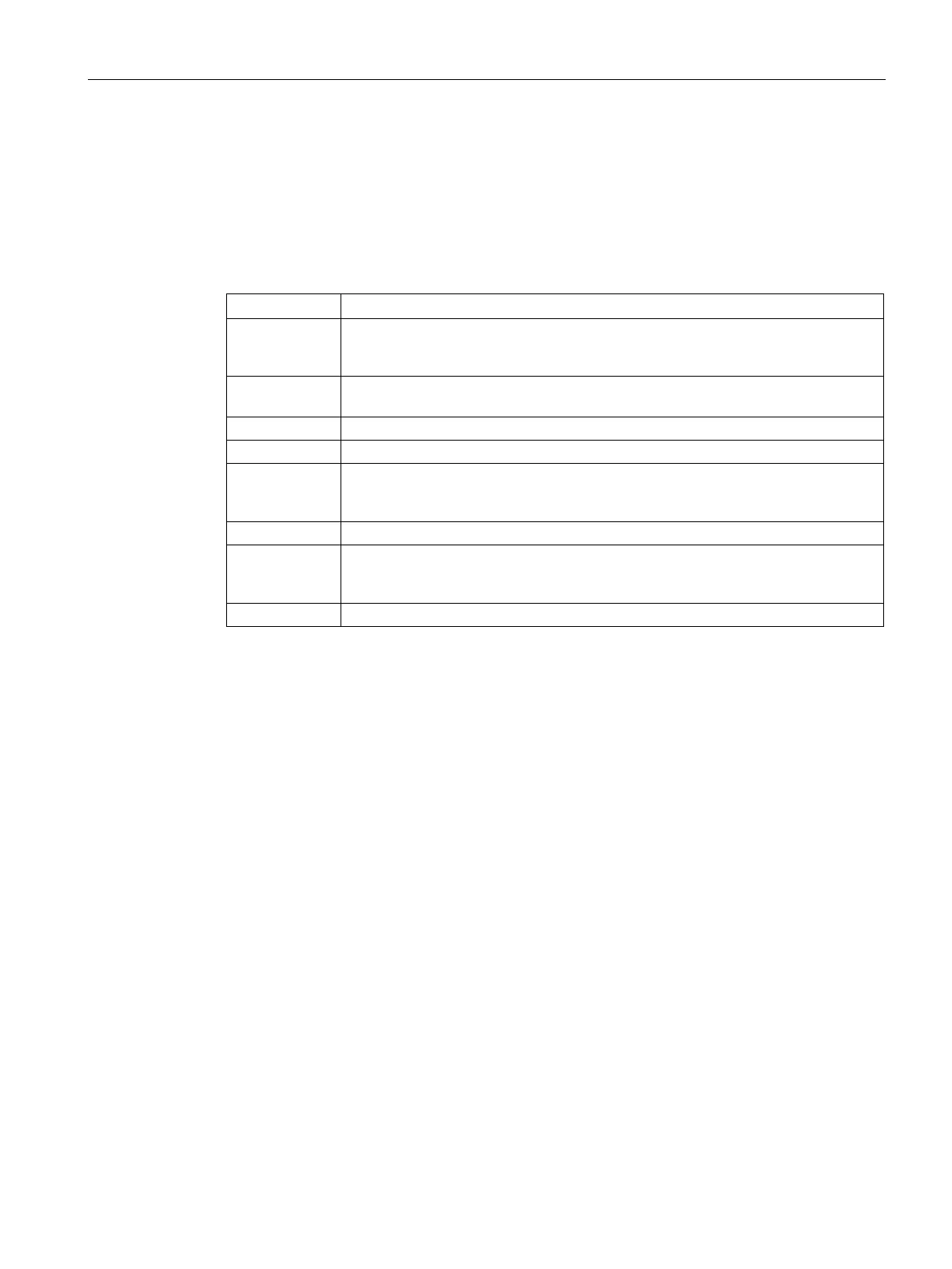
Table 9- 33 USS_RPM_x parameter descriptions
XMT_REQ
(transmit re-
When ON, a USS_RPM_x request is transmitted to the drive on every scan.
Drive Address of the drive to which the USS_RPM_x command is to be sent. Valid ad-
dresses of individual drives are 0 to 31.
Index value of the parameter that is to be read
DB_Ptr The address of a 16-byte buffer must be supplied to the "DB_Ptr" input. This buffer
is used by the USS_RPM_x instruction to store the results of the command issued
Turned on when the USS_RPM_x instruction completes
Error This output byte contains the result of executing the instruction. The USS protocol
execution error codes (Page 560) define the error conditions that could result from
executing the instruction.
When the USS_RPM_x instruction completes, the "Done" output is turned on and the "Error"
output byte and the "Value" output contain the results of executing the instruction. The
"Error" and "Value" outputs are not valid until the "Done" output turns on.

 Loading...
Loading...
















