Open loop motion control
12.7 Using the AXISx_ABSPOS subroutine to read the absolute position from a SINAMICS servo drive
S7-200 SMART
642 System Manual, V2.3, 07/2017, A5E03822230-AF
Setting 3: "One motor revolution produces how many "xxx" of motion?"
This setting defines the relationship between motor revolutions and load movement in the
defined engineering unit (for example, cm and degrees). The relevant equation that yields
the correct value for this setting is as follows:
(2) One motor revolution produces how many "xxx" of motion = c * (m / n)
where, "c" = load movement (in the defined engineering unit) per load revolution,
"m/n" = external gearing ratio expressed as load revolutions per motor revolution
For example, if the mechanical gear ratio is "1:2" and the load movement per load revolution
is 10 cm, then:
"One motor revolution produces how many cm of motion" =
● Do not call the AXISx_ABSPOS subroutine from within an interrupt routine or from a
subroutine called within an interrupt routine.
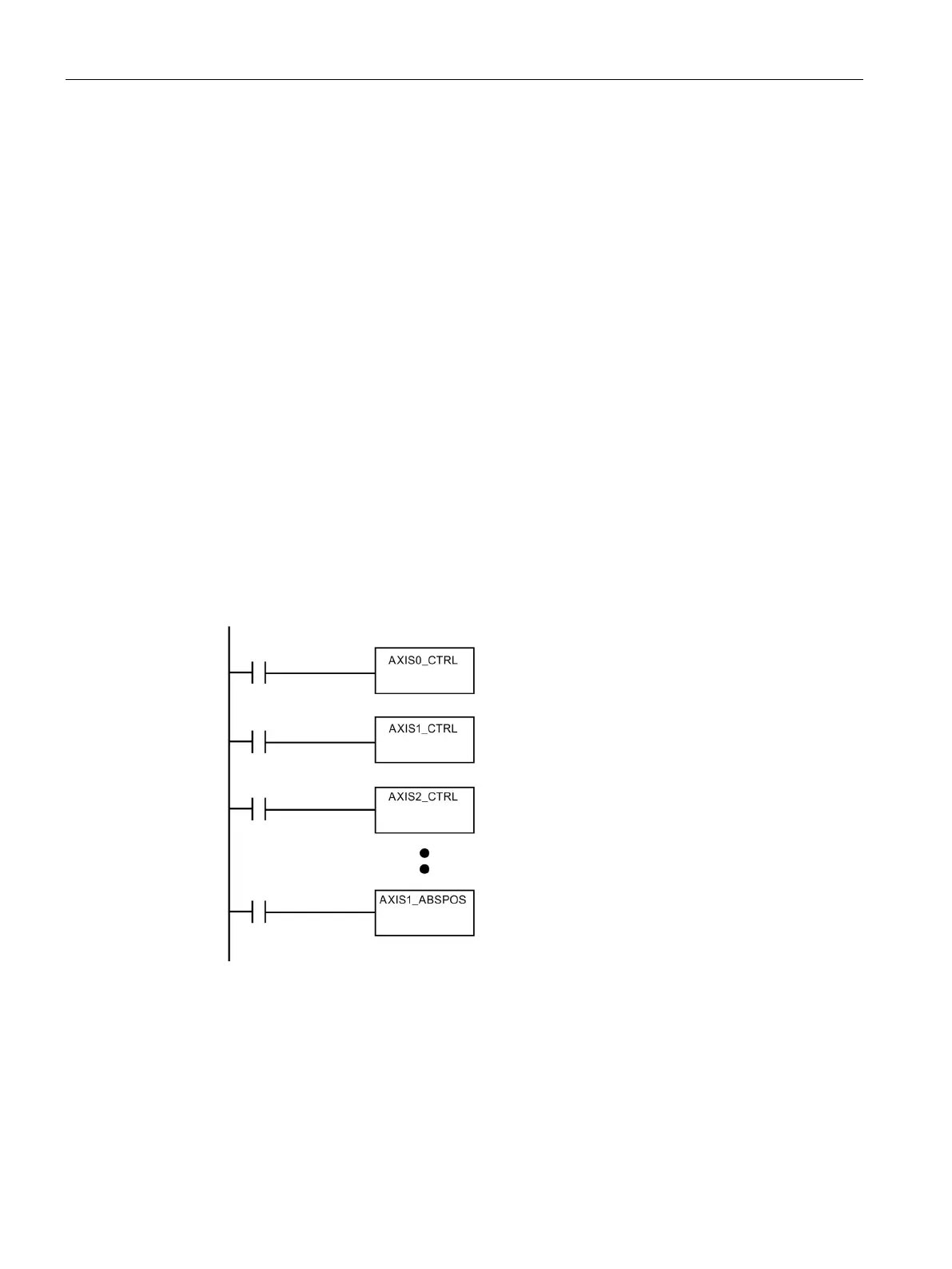
● If you have configured multiple Axes of Motion in your CPU project, ensure that the
AXISx_CTRL subroutines for all axes are executed prior to executing the first
AXISx_ABSPOS subroutine for any axis. The AXISx_CTRL subroutine contains code to
initialize the V memory area used commonly by all instances of the AXISx_ABSPOS
subroutine in your program to manage the communications with the servo drive.
● If you configure your motion axis measurement system to the "relative pulses" setting
instead of the "engineering units" setting, you can still use the AXISx_ABSPOS
subroutine to return position information from the V90 servo drive. Note, however, that
the position value returned in the "D_pos" parameter of the subroutine will then be of type
DINT and is the actual position value reported by the servo drive (there are no
engineering unit conversions performed on the value).

 Loading...
Loading...
















