Open loop motion control
12.2 Using motion control
S7-200 SMART
600 System Manual, V2.3, 07/2017, A5E03822230-AF
Motor data sheets have different ways of specifying the start/stop (or pull-in/pull-out) speed
for a motor and given load. Typically, a useful SS_SPEED value is 5% to 15% of the
MAX_SPEED value. To help you select the correct speeds for your application, refer to the
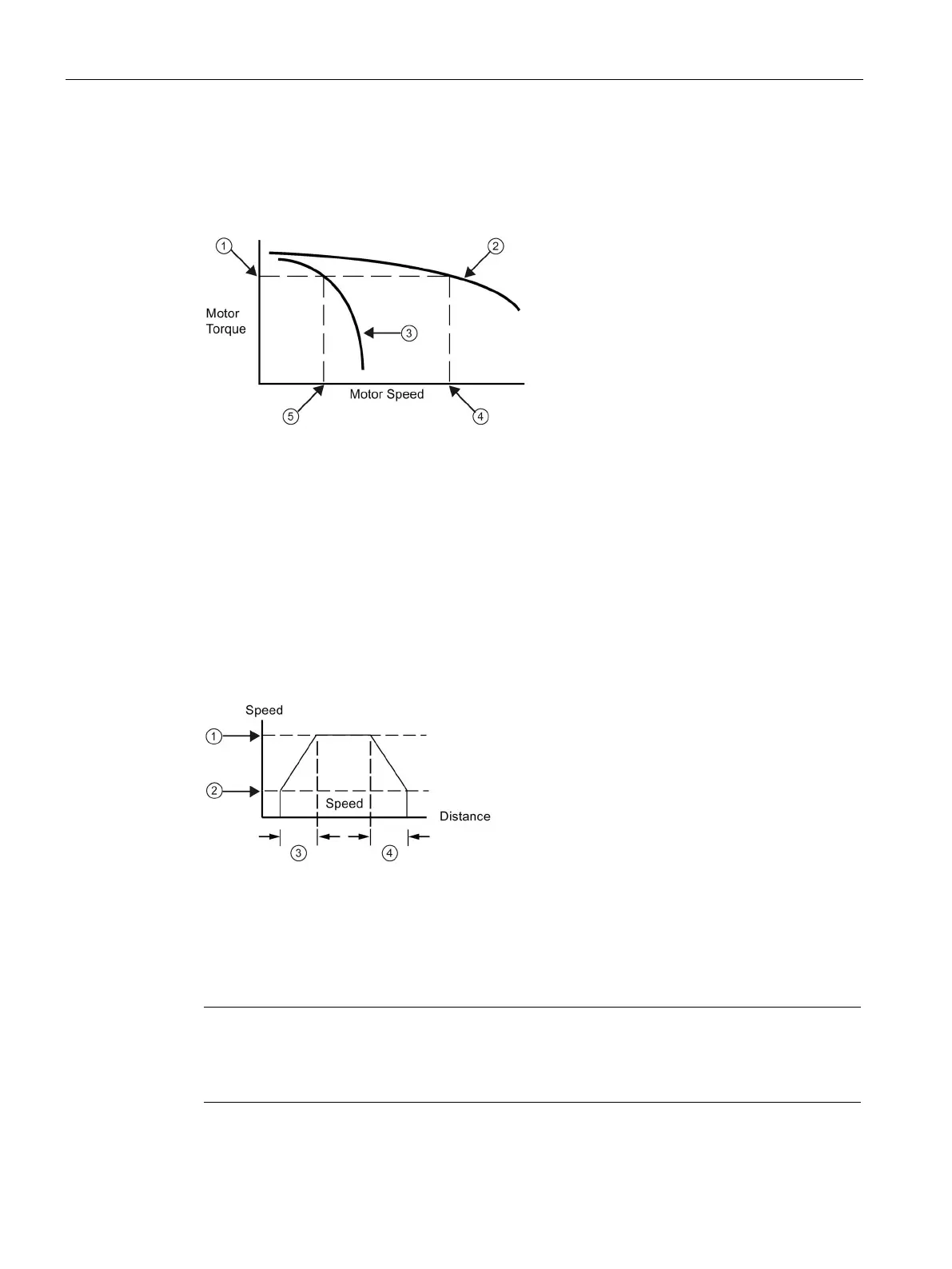
data sheet for your motor. The following figure shows a typical motor torque/speed curve.
Torque required to drive the load
Motor torque versus speed characteristic
Start/Stop speed versus torque: This curve moves towards lower speed as the load inertia
Maximum speed that the motor can drive the load: MAX_SPEED should not exceed this value.
Start/Stop speed (SS_SPEED) for this load
Entering the acceleration and deceleration times
As part of the configuration, you set the
acceleration and deceleration times. The
default setting for both the acceleration
time and the deceleration time is 1 se
c-
nd. Typically, motors can work with
less than 1 second. See the following
figure.
① MAX_SPEED
② SS_SPEED
③ ACCEL_TIME
④ DECEL_TIME
Note
Motor acceleration and deceleration times are determined by trial and error. You should start
by entering a large value. Optimize these settings for the application by gradually reducing
the times un
til the motor starts to stall.

 Loading...
Loading...
















