Chapter: 5. Start-up and system Adaption
NMEA Setup
“Fig. 2.9. Screen 8, NMEA control screen.” on page 20 is used for verication of received and control of
transmitted NMEA messages. Two digital communication channels are provided:
• COM 1 Primary NMEA 0183, (XJ303, RCV1 A/B-XMT1 A/B-XMT2 A/B).
• COM 2 Secondary NMEA 0183/RS-232, (XJ303 NMEA: RCV2 A/B) and J302 (RS-232).
Each channel can be programmed individually with respect to the baud rate and scope of transmitted
messages. Before conguration of the required channel, it must be selected by using the soft key IN/
OUT. Primary channel is called COM 1, and secondary called COM 2. Note: Due to the present
hardware conguration, the NMEA sentences selected for COM 1 will transmit from both XMT1 and
XMT2. Settings set in COM 2 will only be present in the RS-232 output. The text window will represent
information, which corresponds to the currently selected channel. The type of displayed messages
received from external talker (if connected) or transmitted by the sounder, is selectable by using the soft
key DISPLAY input/output. For more easy analysis of the window contents, display can be prevented
from continuous update, if “DISPLAY off” is selected. The baud rate may be set to 4800 or 9600, 4800
being the more common. Transmitted messages are enabled individually by soft keys MESSAGE and
STATUS. To enable/disable particular message, select it from the list by pressing MESSAGE button
until required message appears on the same button and then select the status of this message (on/off)
by pressing STATUS button. It is advisable at this stage to set display in “output” mode, to be able to
observe current scope of transmitted messages. Transmitted talker identier is SD, Sounder Depth.
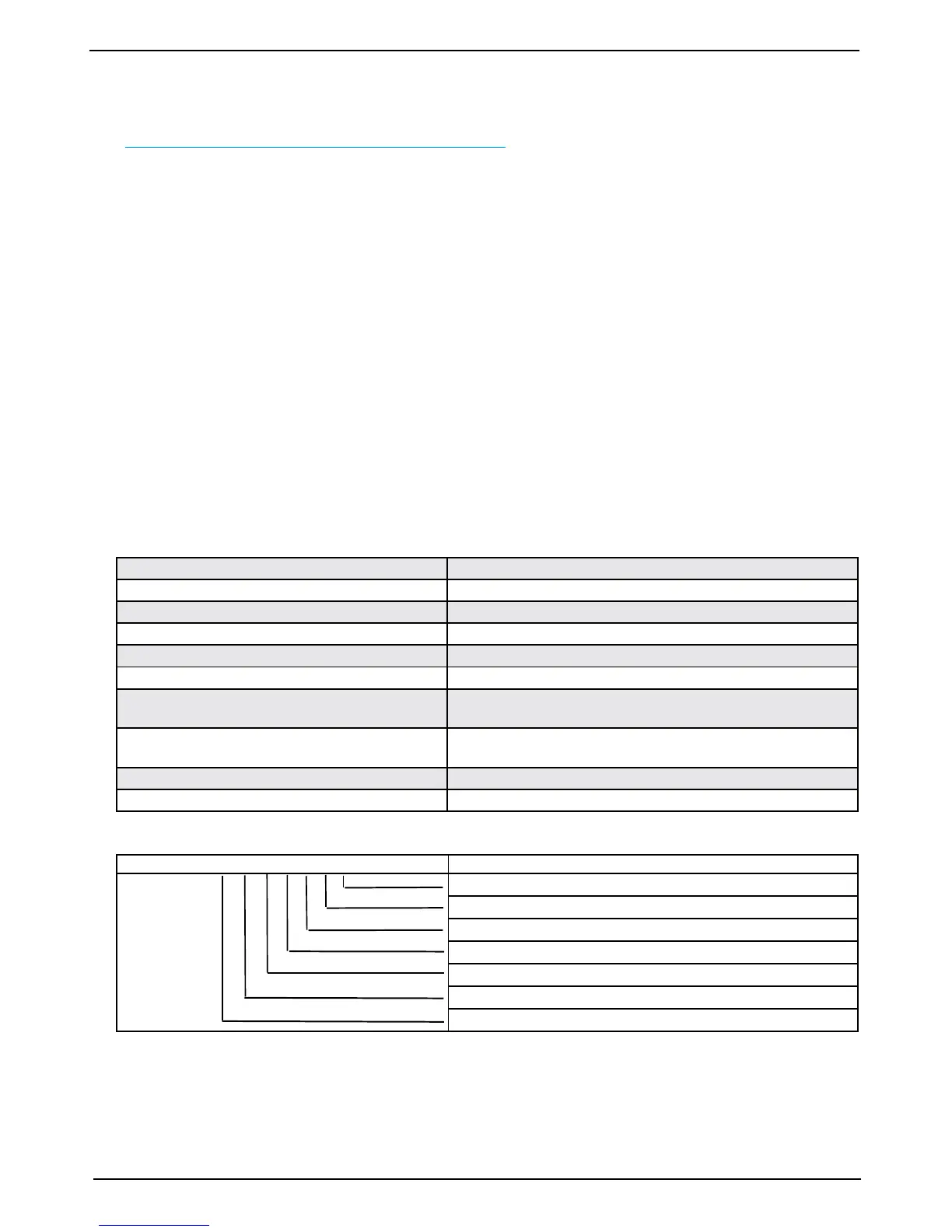
NMEA transmitted/output messages
Depth & Draught $SDDPT,xxxx.x,xxxx.x,xxxx.x*hh<CR><LF>
Depth below surface $SDDBS,xxxx.x,f,xxxx.x,M,xxx.x,F*hh<CR><LF>
Depth below transducer $SDDBT,xxxx.x,f,xxxx.x,M,xxx.x,F*hh<CR><LF>
Depth below keel $SDDBK,xxxx.x,f,xxxx.x,M,xxx.x,F*hh<CR><LF>
1) Multiple transducer installation $PSKPDPT,x.x,x.x,x.x,xx,xx,c-c*hh<CR><LF>
Check sum on/off CHECK SUM
Proprietary Skipper command for Kongsberg/Simrad
EN250. Note: Normally not used on GDS101.
EN250
Proprietary Skipper command for Kongsberg/Simrad
EN250. Note: Normaly not used on GDS101.
EN250 D#
[Fore/Aft] transducer $SDXDR,D,x,x,M,c-c,<Cr><Lf>
Set alarm state $SDALR,hhmmss.ss,xxx,A,A,<Alarm message> *hh<CR><LF>
1) In case of multiple transducer installation, the following SKIPPER proprietary sentence must be
selected:
$PSKPDPT,x.x,x.x,x.x,xx,xx,c--c*hh<CR><LF>
Check sum, possible to turn on/off (see screen 8)
Transducer location *
Echo sounder channel number (0-99)**
Bottom echo strength (0,9)
Maximum range scale in use, meters
Offset from transducer, meters
Water depth relative to transducer, meters
* Text string, indicating transducer position: FWD/AFT/PORT/STB. If position is not preset by operator,
empty eld is provided.
** = 1 - 38 kHz
= 2 - 50 kHz
= 3 - 200 kHz