Application Macros 15-10
605C Frequency Inverter
Macro 4: Process PID
PID error derived from the difference of 2 analog inputs.
Digital input to disable PID.
Additional Operator Menu display parameters.
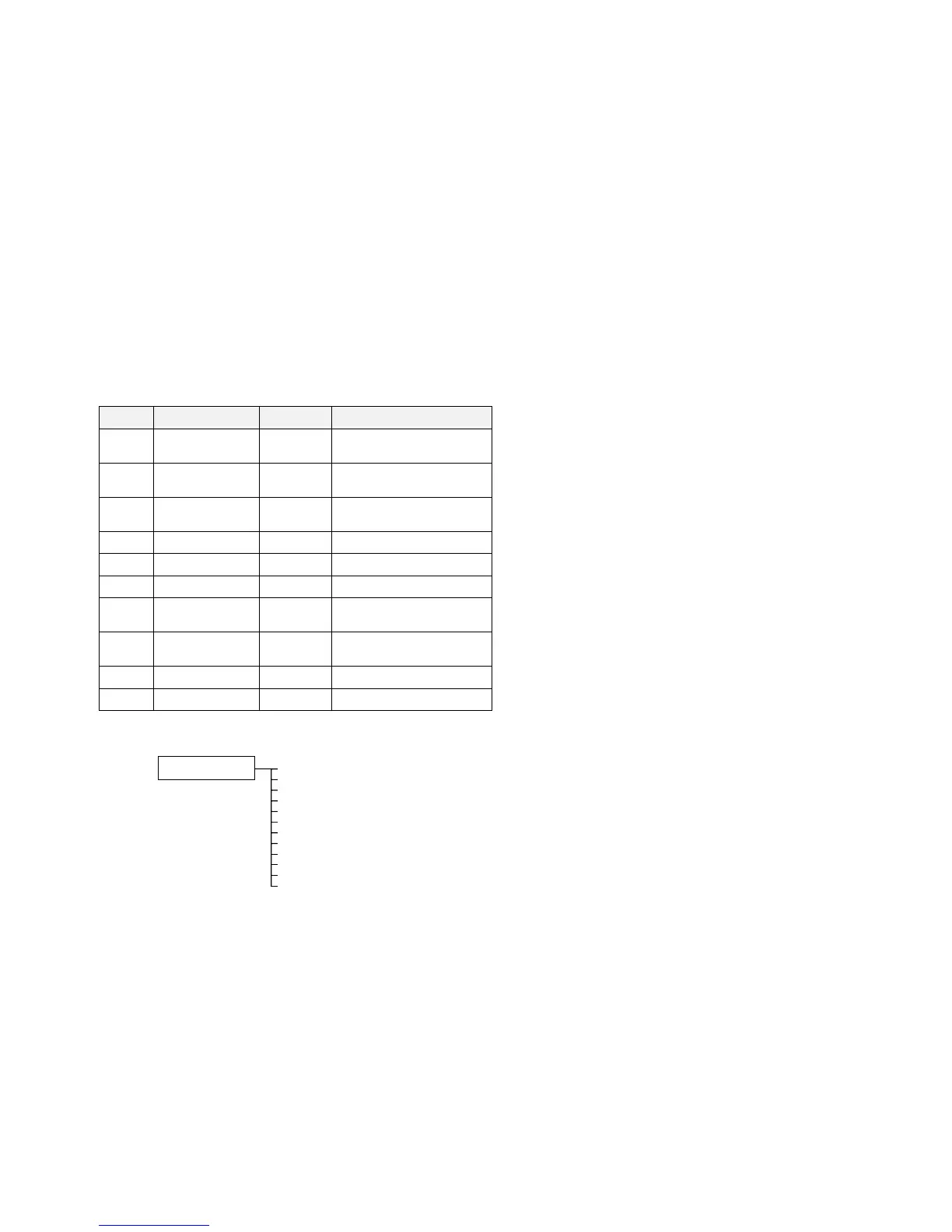
Terminal Name Purpose Comment
1 ANALOG INPUT 1 Process
Setpoint
0V = 0%, 10V = 100%
2 ANALOG INPUT 2 Process
Setpoint Trim
0V = 0%, 10V = 100%
6 ANALOG OUTPUT 1 Ramp Output Absolute Speed Demand,
0V = 0%, 10V = 100%
13 DIGITAL INPUT 1 Run 24V = Run
14 DIGITAL INPUT 2 Trip Reset 0V to 24V transition to reset trips.
15 DIGITAL INPUT 3 Direction 0V = Forward, 24V = Reverse
16 DIGITAL INPUT 4 External Trip 0V = Trip
(connect to terminal 18)
17 DIGITAL INPUT 5 PID Enable 0V = PID Disabled,
24V = PID Enabled
21, 22 DIGITAL OUTPUT 1 Health 0V = Tripped, i.e. not healthy
23, 24 DIGITAL OUTPUT 2 Running 0V = Stopped, 24V = Running
The Operator Menu System for Macro 4
The default Operator menu system is shown below.
SETPOINT (REMOTE)
SPEED DEMAND
DRIVE FREQUENCY
MOTOR CURRENT
LOAD
DC LINK VOLTS
CURRENT LIMITING
PROCESS SETPOINT
STARTUP SCREEN
PROCESS FEEDBACK
PID ERROR
PID ENABLE
ENTER PASSWORD