C
LEAR
P
ATH
U
SER
M
ANUAL
R
EV
.
1.97
38
me”.
the screen capture, taken from MSP,
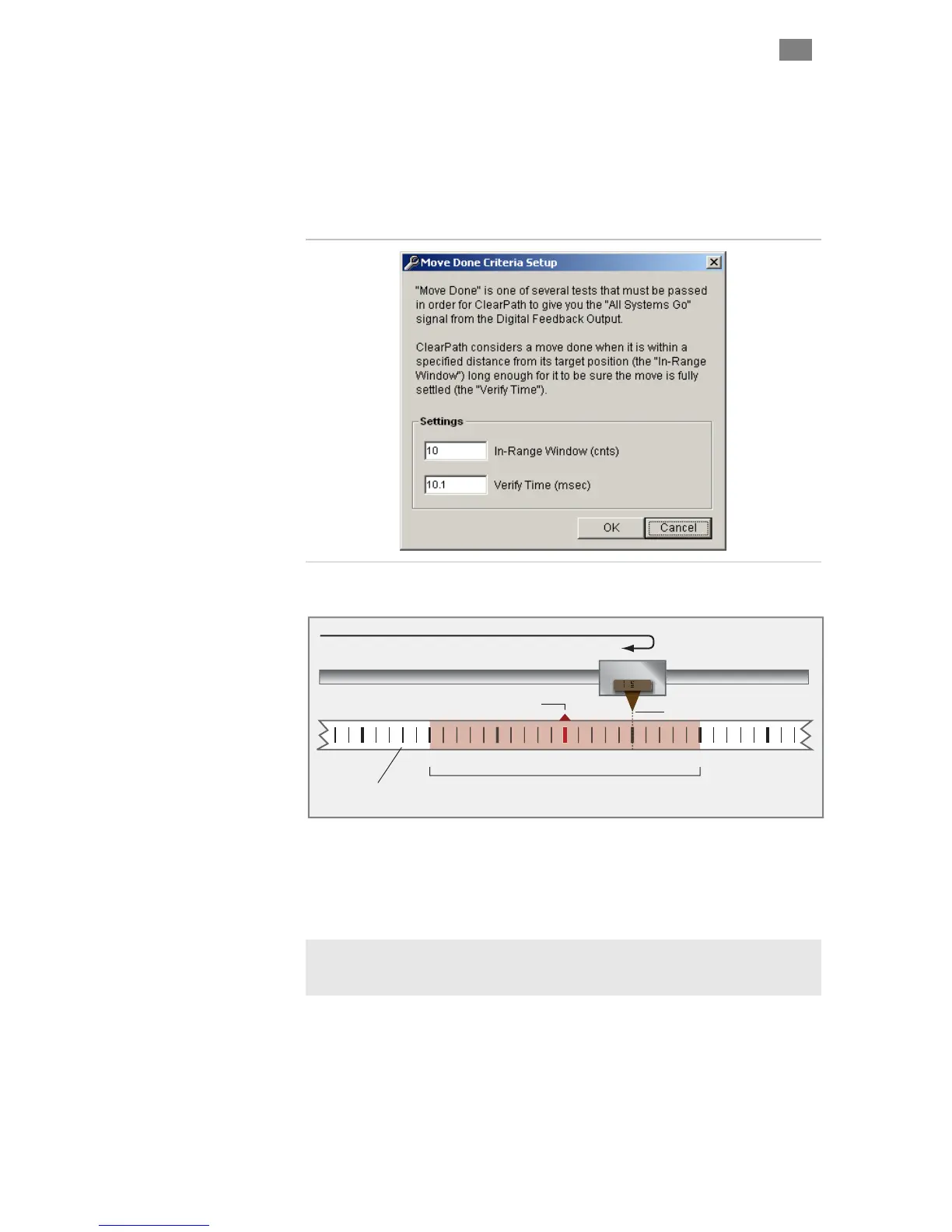
Move Done Criteria
Move Done status is used to determine when the All Systems Go-Position
signal should be asserted at the HLFB output. The Move Done Criteria
consist of two parameters: the “In-Range Window” and the “Verify Ti
These parameters are explained in
below.
Move Done setup dialog
How Move Done Works
Move Done status is achieved when both of the Move Done criteria are
met. In the above figure, Move Done occurs only when the motor is within
+/-10 encoder counts of the commanded position (the In-Range Window)
for a minimum of 10.1 milliseconds (the Verify Time).
0
551015 10 15
Move Direction
Encoder Scale
(1 line = 1 count)
Actual Position (count 5)
Commanded Position (0)
In-Range Window +/- 10 counts
ENCODER
ANNI
Note: If the encoder swings out of the In-Range window during the Verify
Time, the Move Done timer automatically resets. The timer starts a new
countdown only when the motor is back within the In-Range window.
Because mechanical systems and settling performance requirements vary
by application, the user may need to experiment a bit to determine
appropriate values for the In-Range Window and Verify Time.
T
EKNIC
,
I
NC
.
F
AX
(585)784-7460
V
OICE
(585)784-7454