your position is our focus
4.6.7 Navigation Input Filters
T ersm td navigationengine.Thesesettingsareoptimizedalready.It
is comm ha toanypa rsbemadeunlessadvisedbyu-bloxsupportengineers.
henavigationinputfilt asktheinpu ataofthe
notre endedthatc nges ramete
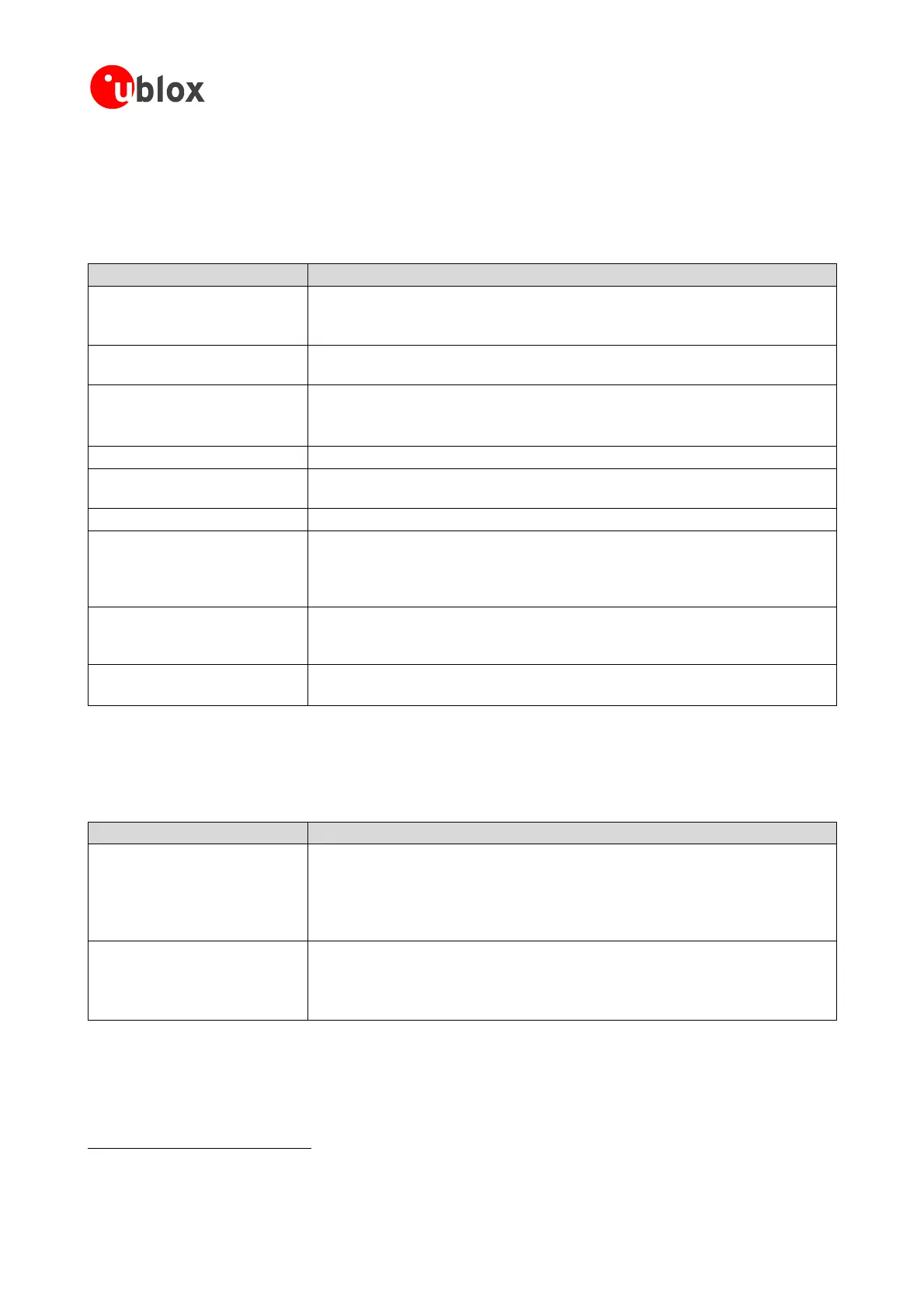
Parameter Description
Fix Mode
Bydefaul positionfixifpossiblebutrevertstoa
2Dpositio letoforcethe
receivert tlycalculate2D(2D-only)or3D(3D-only)positions.
t,thereceivercalculatesa3D
nifnecessary(Automatic 2D/3D).It’spossib
opermanen
Fix Altitude
Initialalti navigationoutputThefixaltitudeisusedifFix
Modeiss incaseofa2DfixafteraColdstart.
tudeusedfor2D
etto2D-only or
Min SVs
Restrictsthenavigationsolutiontobecalculatedwithatleastnsatellites.
Thiscouldbeusedtoinhibitasolutionwithonly3satellites.
Setthisvalueto1singlesatellitefortimingapplications(LEA-4Tonly).
Max SVs
Usesatmost‘n’satellitesforanavigationsolution.
Initial Min SV
Minimumnumberofsatellites,whichmustbeavailablebeforethefirst
positionfixwillbecalculated.
Min C/No
AsatellitewithaC/N0belowthislimitisnotusedfornavigation.
Initial Min C/No
MinimumC/N0fortheinitialfix.Onlysatellitesexceedthisthresholdwillbe
arametermaybesetto
eveahigher
th ofthefirstpositionfix.
usedforthecalculationofthefirstpositionfix.Thisp
ahighervaluethan"MinC/No(Nav)"inordertoachi
confidencein eaccuracy
Min SV Elev
Minimumeleva ehorizoninordertobeusedinthe
navigationsolution.Lowelevationsatellitesmayprovidedegradedaccuracy,
auseofthe ghtheatmosphere.
ation
tionofasatelliteaboveth
bec longsignalpaththrou
DR (Dead Re
10
Thetimeduringwhichthereceiverprovidesanextrapolatedsolution.After
theDRtimeout providedatall.
ckoning)
Timeout
hasexpirednoGPSsolutionis
Table 30: Naviga n Input Filter parameters (UBX-CFG-N
4.6.8 Navigation Output Filters
tio AV2)
Parameter Description
PDOP Mask
P Accuracy Mask
ThePDOPandP reusedtodetermine,ifaposition
solutionismarkedv d EAsentencesortheUBXPosLimitFlagis
set.
Asolutionisconsider liebelowthe
respectivelimits.
ositionAccuracyMaska
ali intheNM
ed andAccuracyvalid,whenbothPDOP
TDOP Mask
y M
TheTDOPandTime determine,whenaTime
eshouldbe
eTIMEPULSE TDOPorthetimeaccuracyexceedsits
pectivelimit.
T Accurac ask
AccuracyMaskareusedto
Puls allowed.
Th isdisabledifeither
res
Table 31: Navigation Output Filter parameter
10
DoesnotapplytoDRenabledreceivers(likeTIM-LR)
GPSModules-SystemIntegrationManual(SIM)(incl.ReferenceDesign) ReceiverDescription
GPS.G4-MS4-05007-A1
Page 100
 Loading...
Loading...

