1.11.1 Dead Reckoning Principal
In contrast to GPS, which delivers absolute positions, Dead Reckoning is a relative method. The sensors give
information for a definedmeasurement period, andthe location is calculated relative to the previously known
position.ThereforeanabsoluteGPSpositionisrequiredasastartingpoint,whichisthelastknownGPS
position.
δ
s
y
n
x
n
y
n+1
=y
n
+dy
x
n+1
=x
n
+dx
Known parameters:
s
=Tr aveleddistance(odometer,direction)
δ
=Newan gle(gyroscope)
dy
=scos(
δ
)
dx
=ssin(
δ
)
=last GPSposition
=DRposition
x
y
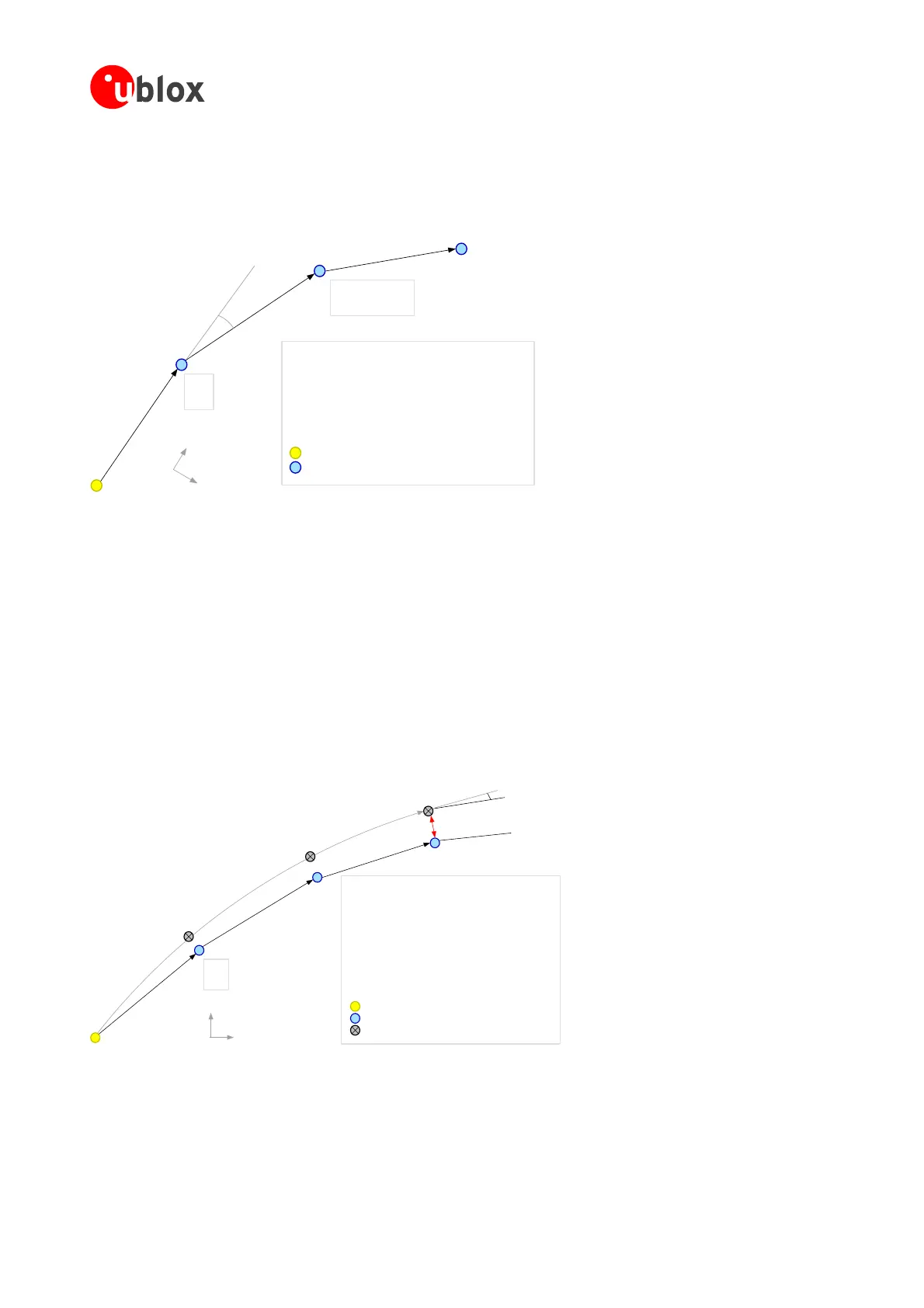
Figure 28: Dead Reckoning Principle
Parametersusedfortherelativepositioncalculationare:
• Distance traveled: Odometerpulses
Forward/backwardindicator
• Angular turn rate: Gyroscope
1.11.2 Dead Re
DR en
t se
positionoutput.
e fig
• Direction:
ckoning Performance
As isanincrem talalgorithm,thequalityoftheDRpositiondependsverymuchonthequalityandstability
of he sensors u d. An accurate model, low tolerances and low thermal drifts are fundamental for reliable
Th performance uresofaDRsystemarealwaysrelativetotraveled
distanceortime.
y
n
x
n
calculated route
based on sensor
signals
Known parameters:
S
=Traveleddistancesince GPSSign alslost
d
=Distanceerror
Performance parameters:
d/S
=Positionerrorpercentageincomparison
todistancetraveled
∆Φ
=
Angularheadingerror
Fix types:
=GPSposition
=DRposition
=Realpos ition
d
∆Φ
Actual route
Length = S
x
y
Figure 29: Dead Reckoning Performance Parameters
The seamless transition between absolute GPS positions and relative DR positions is advantageous in getting
optimalperformancefromaDRenabledGPSreceiver.ANTARIS
®
4GPSTechnologyemploysblendedalgorithms
toobtaintheoptimumfrombothsystems.
GPSModules-SystemIntegrationManual(SIM)(incl.ReferenceDesign) GPSFundamentals
GPS.G4-MS4-05007-A1
Page 33
 Loading...
Loading...

