GPS Positioning is weightedmoreheavily as longas the GPS parameter (e.g. DOP, number of satellites, signal
ations, wherethe GPS signalsare poor, reflected from
withahigherweighting.
quality) indicates good andreliableperformance. In situ
buildings(multipath)orjammed,theDRsolutionisused
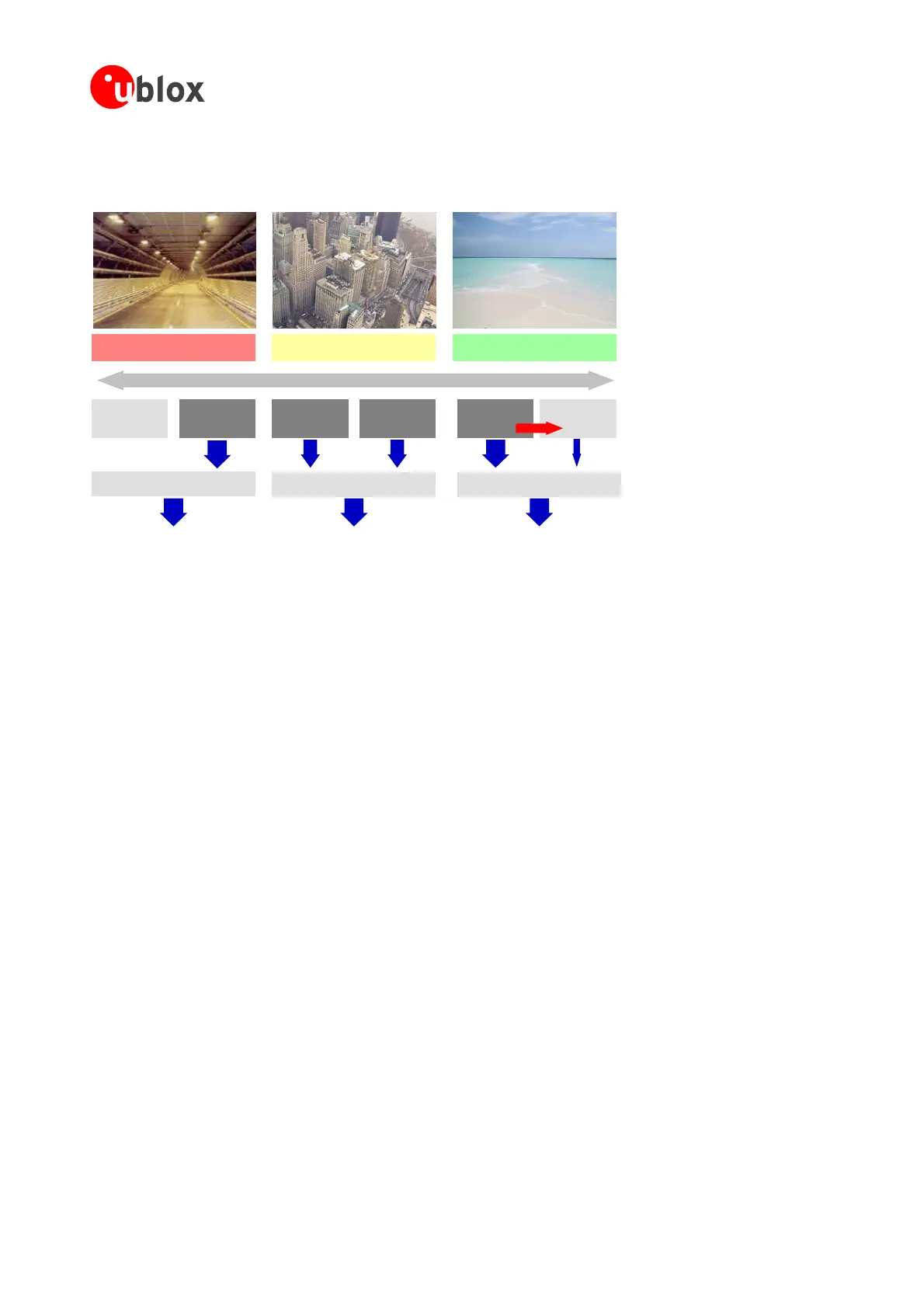
Poor GPSNo GPS Good GPS
GPS DRGPS DRGPS DR
Extrapolation
Blending Calibration
EKF
EKF EKF
Position,Velocity,Time
Position,Velocity,Time
y,Timefrom
eclock
Position,Velocit
real-tim
Altitudeheldconstant
Fig re 30: Dead Reckoning Blending u
(sensor based) positions are reported. The position is calculated
based on the signals of the turn rate sensor and speed sensor, with reference to the last
reception, the
S and sensor based
•
situation, the
GPS position values are used to
calibrate the DR sensors or to perform sensor integrity
checks(toestablishifthesensorsarewellcalibrated).
• No GPS: During GPS loss, only DR-
knownGPSsolution.
• Poor GPS: In urban canyons with fast changing sky visibility or during degraded GPS
ANTARIS
®
4 DR Technology performs a calculation by blending the GP
positioning.
Good GPS: With good GPS performance and optimal sky view, the GPS position has a higher weight
than the DR/sensor based position on the overall navigation solution. In this
GPSModules-SystemIntegrationManual(SIM)(incl.ReferenceDesign) GPSFundamentals
GPS.G4-MS4-05007-A1
Page 34
 Loading...
Loading...

