your position is our focus
Platform Description
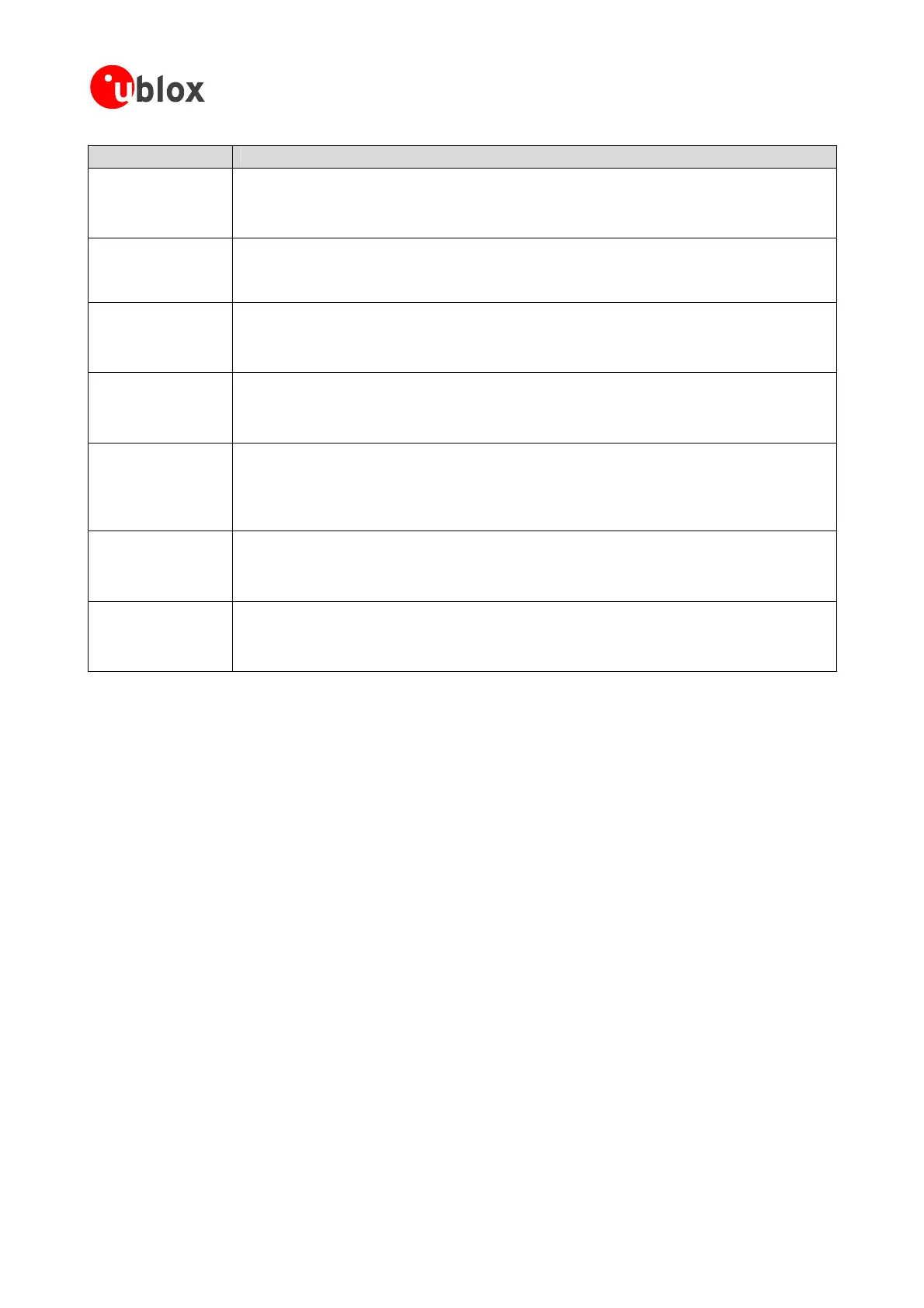
Stationary
Timingapplications(antennamustbestationary)orotherstationaryapplications
• Velocityisconstrainedto0m/s
zerodynamics)• Noprocessnoise(assuming
Pedestrian
Applicationswithlowaccelerationsandlowspeed,asanyportabledevicescarriedand
elerations
movedbymanpower.
• Assuminglowacc
A tomotive
Usedforapplicationsthatcanbecomparedwiththedynamicsofa
u
passengercar.
• Assuminglowverticalacceleration
• Assuminglowprocessnoise
At se
Recommendedforapplicationsatsea,withzeroverticalvelocity.
• Assumingzeroverticalvelocity
a
• Assuminglowprocessnoise
Airborne <1g
Usedforapplicationsthathavetohandleahigherdynamicrangethanacarandhigher
verticalaccelerations.
in noise
ssupp
• Assuming
• No2Dpos
termediatepr
itionfixe
ocess
orted
Airborne <2g
d r vironment.
Assuminghighprocessno
Recommende foratypicalai planeen
• ise
• No2Dpositionfixessupported
Airborne <4g
extremedynamicenvironment.
Assuminghighprocessno
Onlyrecommendedforan
• ise
• No2Dpositionfixessupported
Table 29: Dynamic Platform odel
Note Dynamic platforms designed for high acceleration systems (e.g. AIRBORNE < 2G) may result in a
tan rddeviation thereported sition.
4.6.4 Static Hold Mode
atic Hold mode the navigation algorith to decrea the noise e pos outp hen the
velocity is ned ‘Sta ic Hold Threshold’. This reduces th on der used by
environmental issues su lications.By
default,staticholdmod
disabled.
Function
tic HoldThreshold’,theposition iskeptconstant.Oncethe statichold
modehasbeenentered,thepositionandvelocityoutputwillkeptconstant,untilthereisevidenceofmovement.
Suchevidencecanbe velocity, acceleration,changesofthe validflag
(e.g.positionaccuray estimateexceeding
thePositionAccuracyMask,seealsosection4.6.8.1),positiondisplacement,etc.
Inolderfirmwareversions(<V5.0),thestaticholdmodewasreleaseifthespeedhadrisentotwicethevalueof
the‘StaticHoldThreshold’orifthereceiverhasmovedsignificantly.
M
greaters da in po
The St allows
re-defi
ms se
in th
e positi
ition
wan
ut w
ca below a p t
ch as multipath and improves positionaccuracy especially in stationary app
e
is
Ifthespeedgoesbelowthedefined ‘Sta
GPSModules-SystemIntegrationManual(SIM)(incl.ReferenceDesign) ReceiverDescription
GPS.G4-MS4-05007-A1
Page 98
 Loading...
Loading...

