your position is our focus
4.4.3.2 UBX Message Class
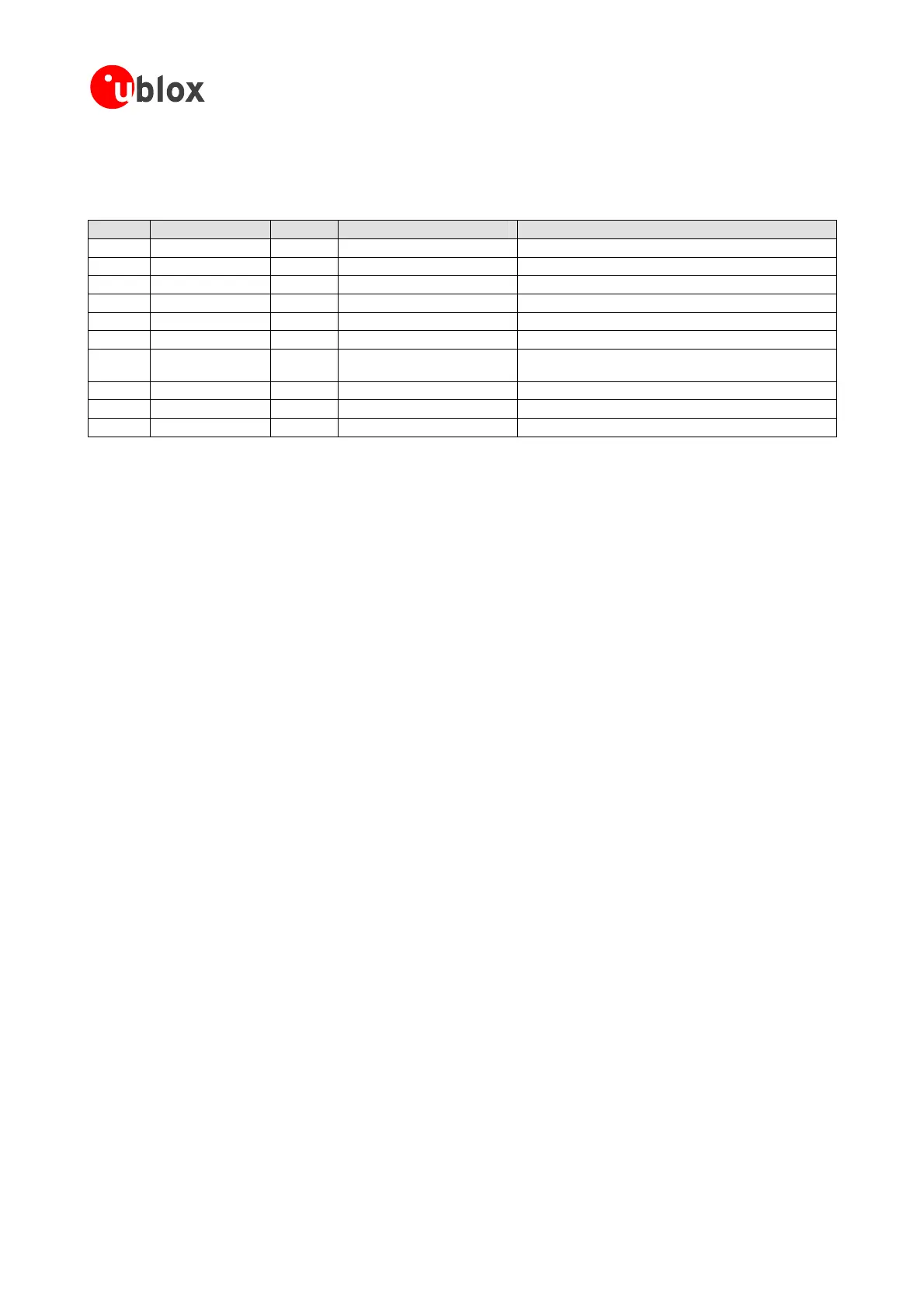
is es,whicharerelatedtoeachother.Thefollowingtablegivestheshortnames,AClass agroupingofmessag
descriptionandClassIDDefinitions.
C ss ID la Class Name Class No Description Examples
NAV Navigation 0x01 NavigationResults Position,Speed,Time,Acc,Heading,DOP,SVsused
RXM ReceiverManager 0x02 ReceiverManagerMessages PseudoRanges,avg.C/N0,ChannelSTATUS
INF mative 0x04 Printf-StyleMessages Error,Warning,Notice Infor
A K AcknowledgemenC t 0x05 ReplytoCFGInputMessages Ack/Nack
CFG icModel,SetDOPMask Configuration 0x06 ReceiverConfigurationInput SetDynam
UPD Update 0x09 FirmwareUpdateMessages
MON Monitor 0x0A ANTARIS
®
Monitor StackUsage,CPULoad,Communication,IPCandtask
status
AID Aiding 0x0B NavigationAiding Position,Time,Ephemeris,Almanacfeeds
USR User 0x4x SCKCustomerMessages SCKCustomerMessages
TIM Timing 0x0D Timing Timepulsedata,Timemarkdata
Table 24: UBX Message Class
!
ure P
Valuesare
offsets, wh ltiple of 2, 4-byte values shall start at a multiple of 4, and so on. This can easily
be
achievedby placingthelargestvalues firstin theMessage payload(e.g. R8),and endingwiththesmallest(i.e.
one-byterssuchasU1)values.
Number Formats
Allmulti-bytevaluesare orderedin LittleEndianmanner, unlessmentioned otherwise.Allfloating-pointvalues
are transmitted in IEEE754 single or double precision. A technical description of the IEEE754 format can be
swerBook
fromtheADS1.x(ARMDevelopersSuite)toolkit.
Warning AllremainingclassIDsarereserved
4.4.3.3 UBX Payload
Struct acking
placedinanorderthatstructurepackingisnotaproblem.Thismeansthat2-Bytevaluesshallstarton
ich are a mu
Message Naming
Addingtheclassnameandadashinfrontofthemessagenamedoesrefertomessages.Forexample,theECEF-
Messageisreferredtoas
NAV-POSECEF.Addingadashand thename, e.g.NAV-POSECEF-X,doesreferringto
values.
foundintheAn
GPSModules-SystemIntegrationManual(SIM)(incl.ReferenceDesign) ReceiverDescription
GPS.G4-MS4-05007-A1
Page 83
 Loading...
Loading...

