taken as the zero point, and the trajectory of the robotic arm refers
to the tool coordinate system.
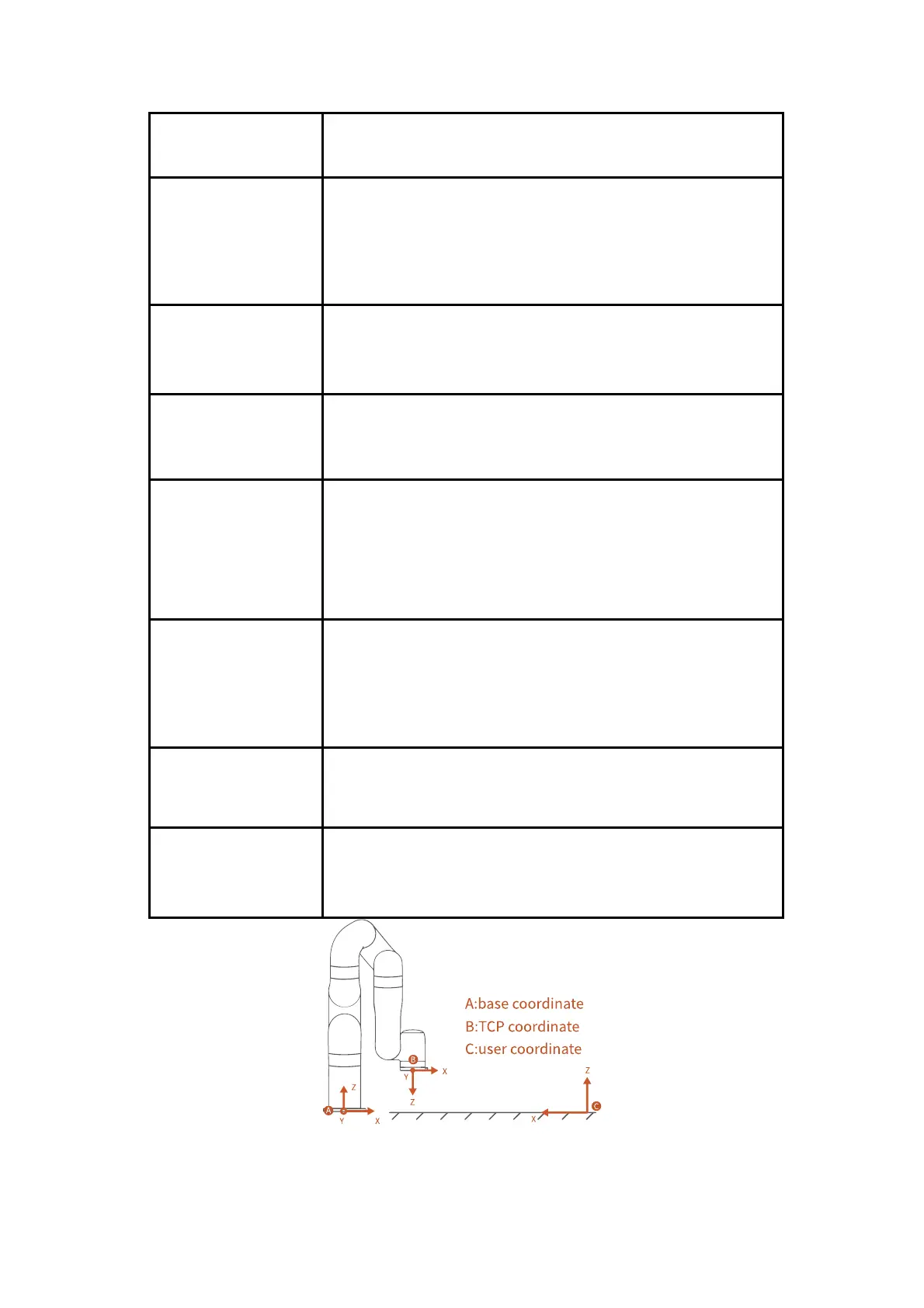
User Coordinate
System
(Please refer to the
figure 1)
The user coordinate system can be defined as any other reference
coordinate system rather than the robot base.
In this mode, the robotic arm will enter the ‘zero gravity’ mode,
since the gravity is compensated, the user can guide the robotic
arm position directly by hand.
Teach sensitivity range is from 1 to 5 level. The larger the set
value, the higher the teach sensitivity level, and the less the force
required to drag the joint in the manual mode.
The collision sensitivity range is from 0 to 5 level. When it is set to
0, it means that collision detection is not enabled. The larger the
set value, the higher the collision sensitivity level, and the smaller
the force required to trigger the collision protection response of
the robotic arm.
General-purpose input and output.
For the input, you can check the potential of the pin by reading a
register;
For the output, you can write a certain register to make this pin
output high or low potential;
When this mode is activated, the boundary range of the cartesian
space of the robotic arm can be limited. If the tool center point
(TCP) exceeds the set safety boundary, the robotic arm will stop
moving.
When this mode is activated, the maximum linear velocity of the
Cartesian motion of the robotic arm, the maximum joint speed,
and the range of the joint motion will be limited.