145
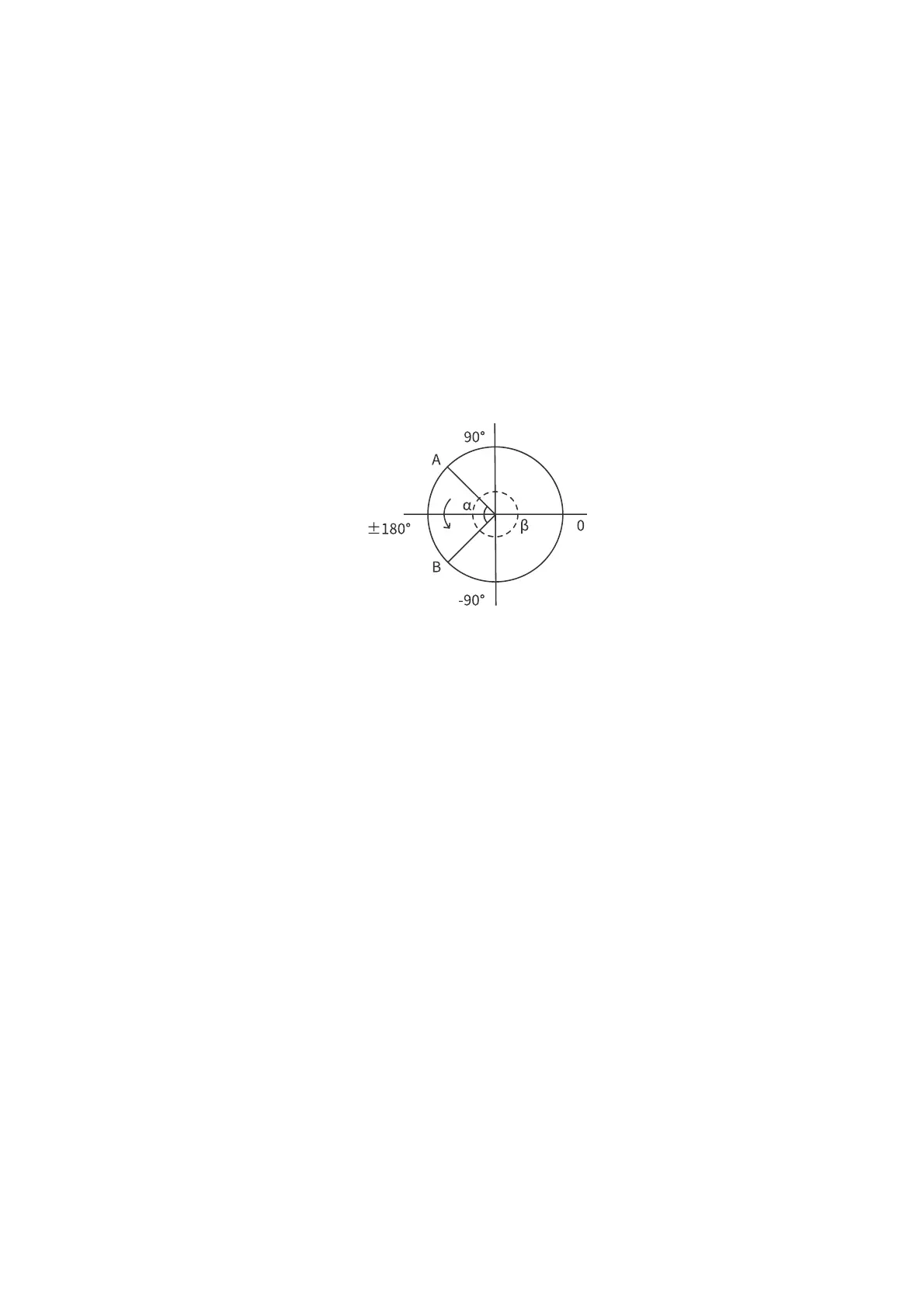
deflection is needed from position point A to point B, the robotic arm
moves in the direction of α angle. If the robotic arm needs to be
moved in the direction of the β angle, a new position between the
angles of β should be inserted, and the angle that formed by the
inserted point and A should be smaller than α.
● The +180° and -180°points of the Roll/Pitch/Yaw are coinciding in
the space, and the valid range is ±180°, so it is possible to have
both ±180° when the robotic arm is reporting the position.
● Roll angle, pitch angle, and yaw angle (RPY). The RPY rotation
matrix (X, Y', Z" rotation) is determined by the following formula:
R rpy (γ, β, α) = R Z (α) · R Y (β) · R X (γ)