203
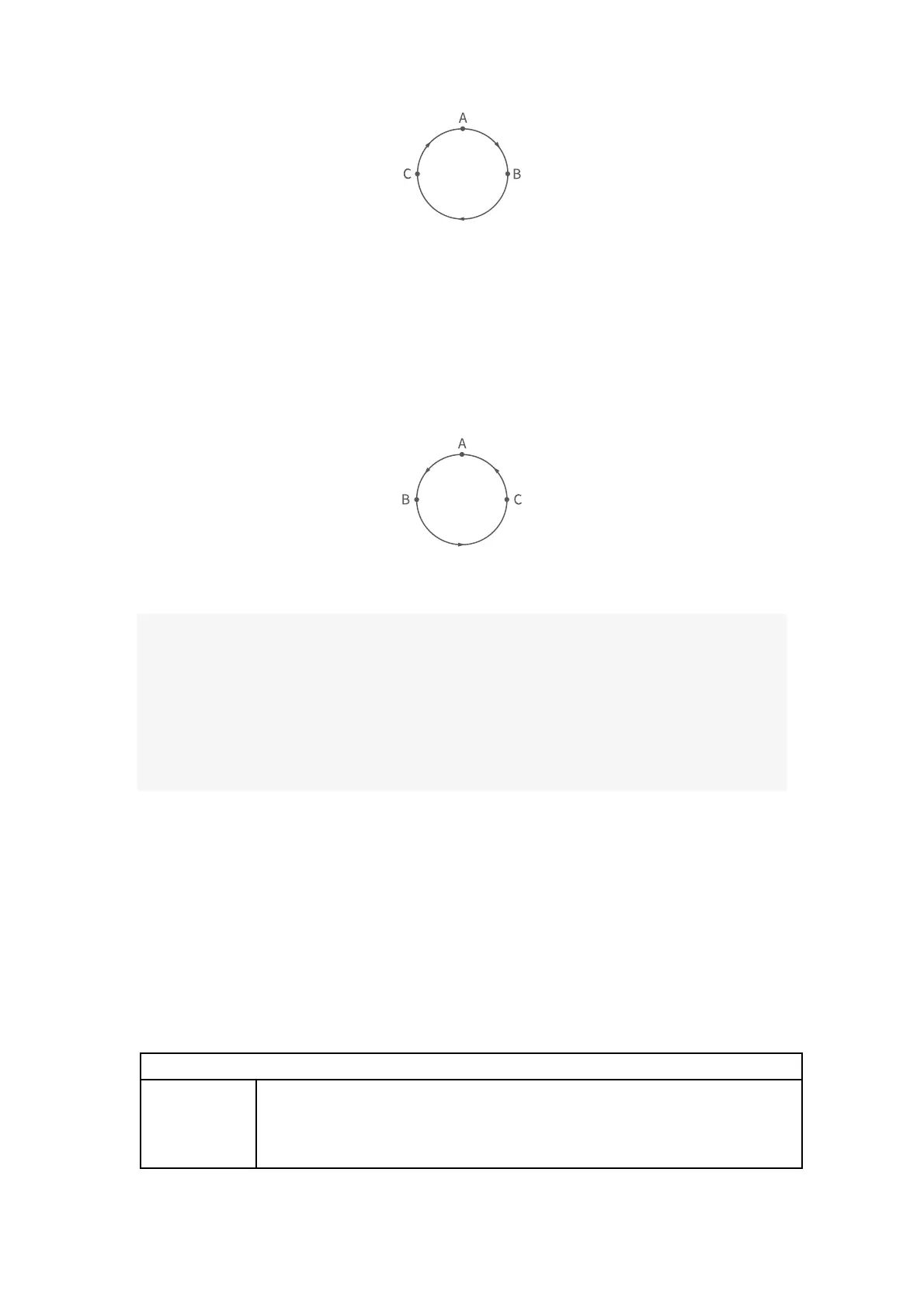
⚫ If the positions of point B and C are swapped, point B is (350, -
50,400,180,0,0), point C is (350,50,400,180,0,0), the robotic arm will
draw a circle in a counterclockwise direction. The trajectory of the
robotic arm is as follows:
Python example:
arm.set_servo_angle(angle=[0.0, -45.0, 0.0, 0.0, -45.0, 0.0], speed=20, mvacc=500, wait=True)
arm.set_position(*[300.0, 0.0, 400.0, 0.0, -90.0, 180.0], speed=300, mvacc=2000, radius=-1.0,
wait=True)
move_circle([350.0, 50.0, 400.0, 180.0, -90.0, 0.0], [350.0, -50.0, 400.0, 180.0, -90.0, 0.0], 1000.0,
speed=300, mvacc=2000, wait=True)
set_servo_angle interface: see Table 2.1.
set_position interface: see Table 2.2.
The move_circle interface is described in Table 2.4:
Table 2.4 move_circle description