66
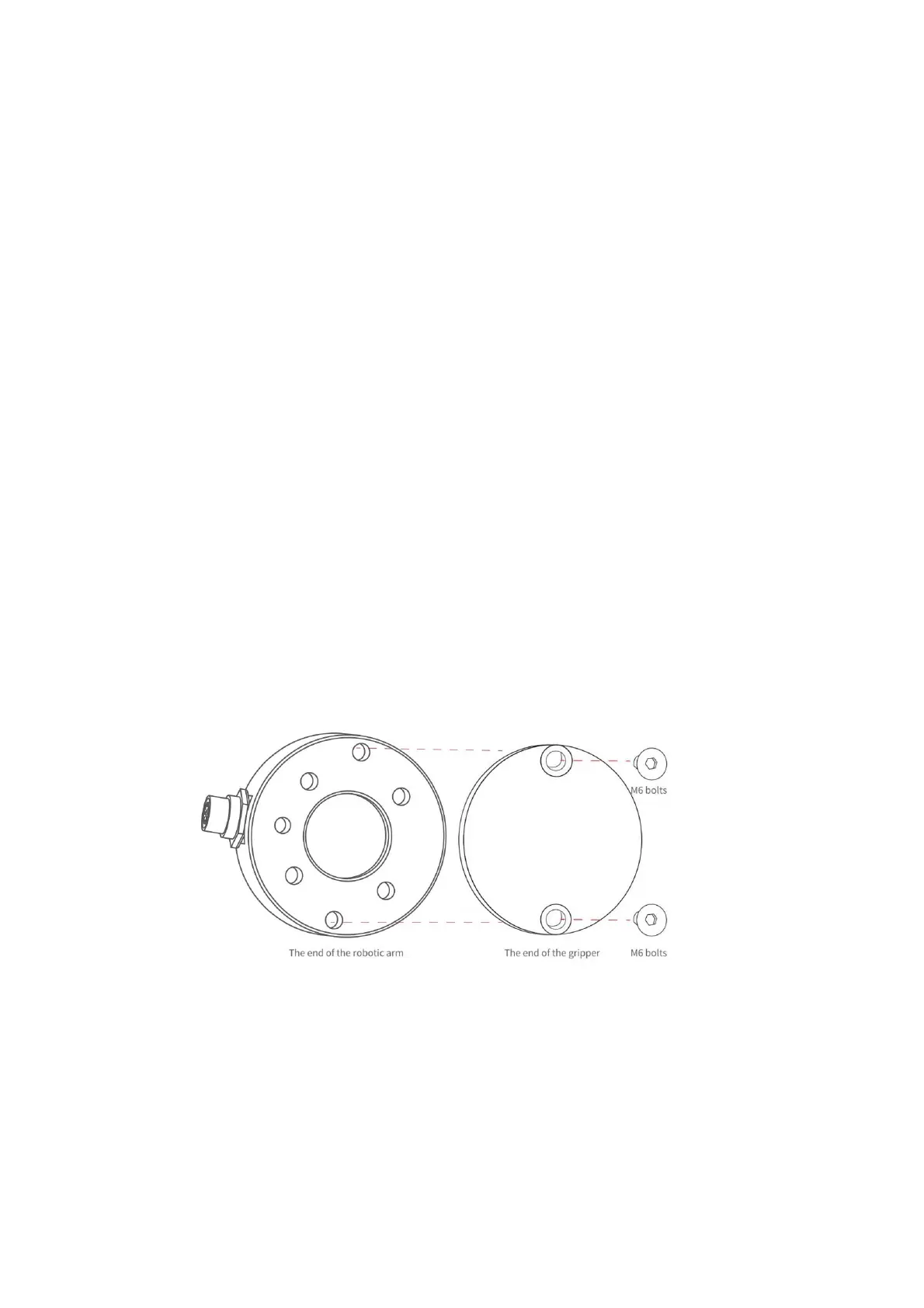
3.1.1. Gripper Installation
Installation of gripper:
1. Move the robotic arm to a safe position. Avoid collision with the robotic
arm mounting surface or other equipment;
2. Power off the robotic arm by pressing the emergency stop button on
the control box;
3. Fix the gripper on the end of the robotic arm with 2 M6 bolts;
4. Connect the robotic arm and the gripper with the gripper connection
cable;
Note:
1. When wiring the gripper connection cable, be sure to power off the
robotic arm, to set the emergency stop button in the pressed state, and