95
data can be referenced during Blockly programming.
【Set as default】: Set the offset data to the offset of the current robotic
arm and display the current offset at the top.
【New】: Create a new offset record.
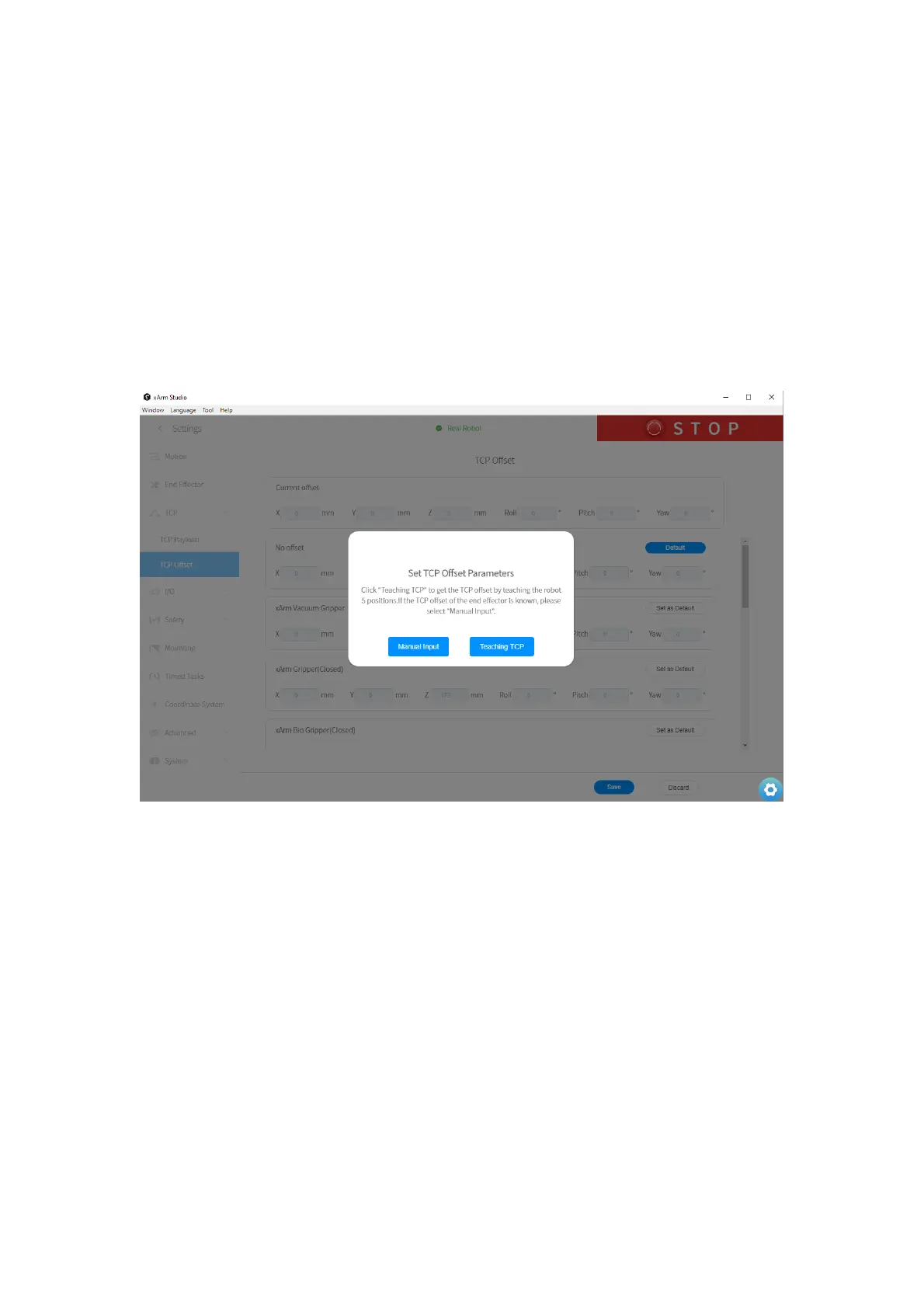
When creating a new TCP offset, there are two ways to set the new TCP
offset parameters, as shown in the figure below:
1) Manual Input
When the TCP offset parameter of the end effector is known, you can
choose to manually input its TCP offset parameter.
2) Teaching TCP
When the TCP offset parameter of the end effector is unknown, click the
[Teach and Acquire] button to obtain the TCP offset parameters by
teaching 5 points.
【Select】: Select the offset data to be deleted in the next step.