14.6 Command: Fixed Waypoint
Figure 14.6: Joint space (MoveJ) vs. cartesian space (MoveL) movement and blend.
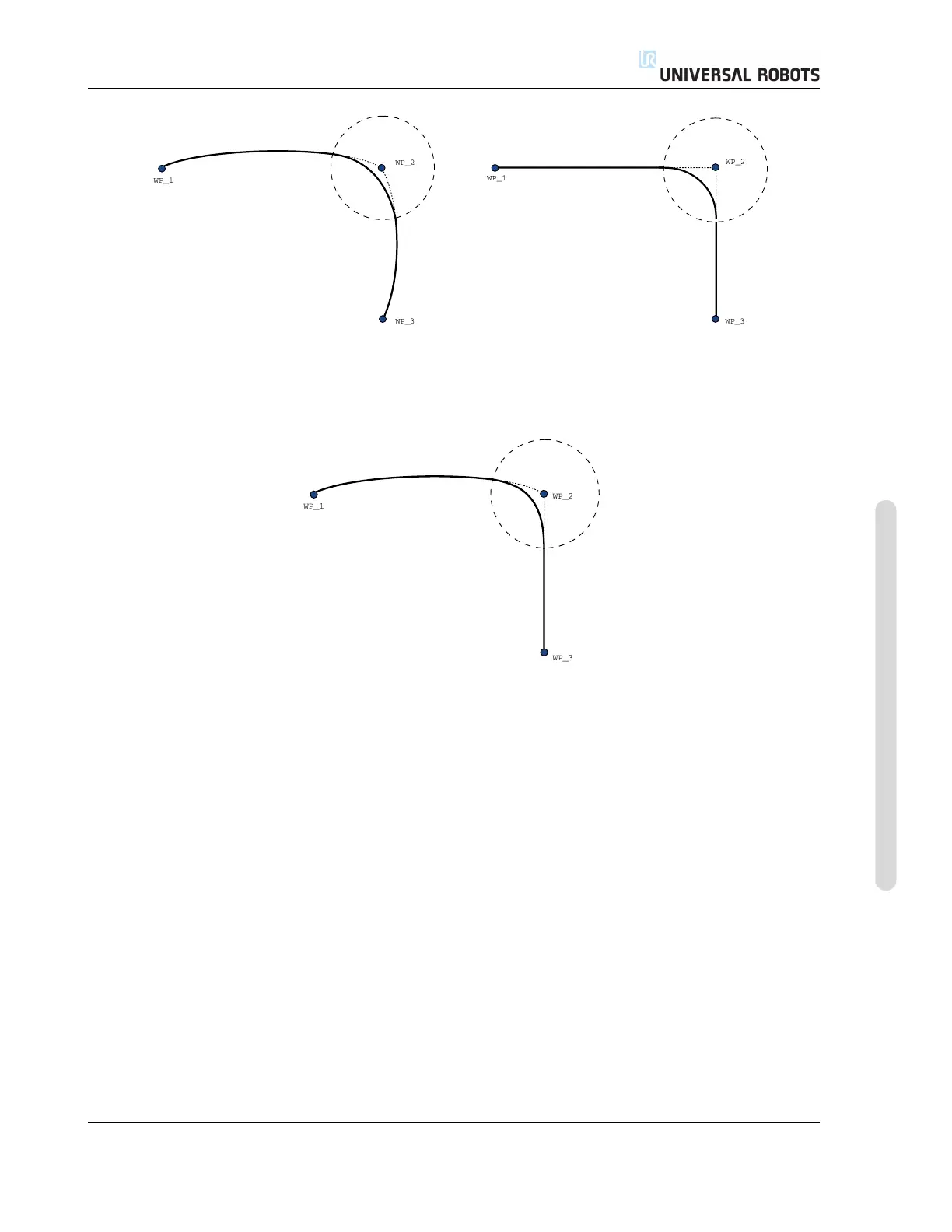
Figure 14.7: Blending from a movement in joint space (MoveJ) to linear tool movement (MoveL).
two trajectories. Caution: if the velocities are very different (e.g. by specifying advanced settings -
either velocity or time - for a specific waypoint) this can result in large deviations from the original
trajectory as shown in figure 14.8. If you need to blend between different velocities and cannot
accept this deviation consider a blend in Cartesian space using MoveL instead.
Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.
II-81 CB3