Product Manual CANcockpit
TU00-0726-5111102 Technische Änderungen vorbehalten 0609 Technical details subject to change 5.2 - 6
The reproduction, distribution and utilization of this document as well as the communication of its contents to others without express
authorization is prohibited. Offenders will be held liable for the payment of damages. All right reserved in the event of the grant of a patent,
utility model or design
.
CANopen-Specification for CANcockpit
Error handling
Emergency messages shall be triggered by internal errors in the device and they are assigned the highest possible priority to
ensure that they get access to the bus without latency. The Emergency messages shall contain the error field with pre-defined
error numbers and additional information.
Error behaviour
If a serious device failure is detected the module shall enter autonomously the Pre-operational state.
Device failures should include the following communication errors:
• Bus-off conditions of the CAN interface
Severe device errors also may be caused by device internal failures, in which case CANcockpit may perform an internal reset
-for example triggered by the watchdog- and then after the initialisation move to Pre-operational state.
Emergency Messages
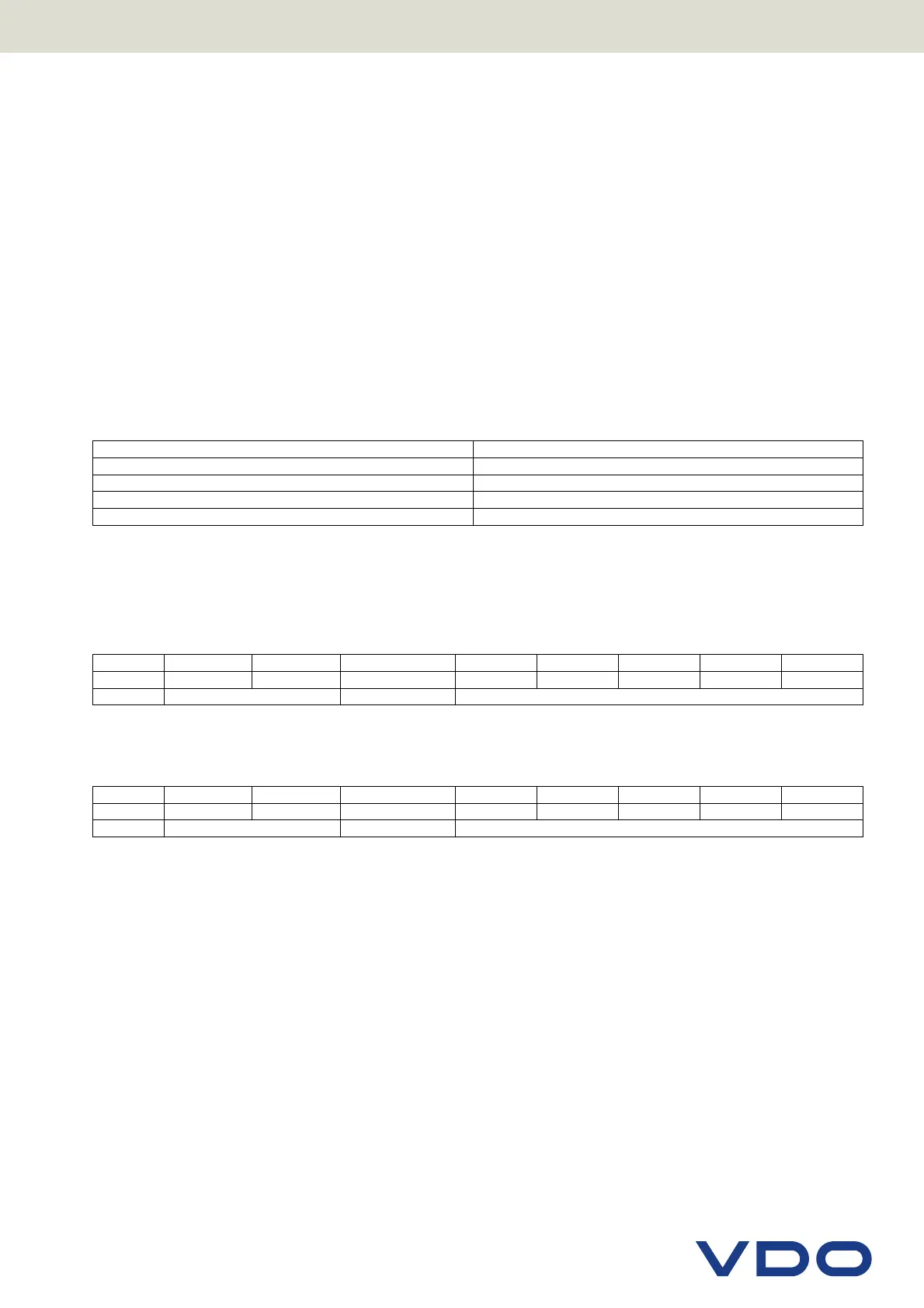
Supported Emergency Error Codes:
Error Code (hex) Meaning
0000 Error Reset or No Error
1000 Generic Error
3015 Kl15 off
63EE Data Set, EEPROM checksum error
The following conditions will cause an emergency message being sent:
1. When CANcockpit is in pre-operational or operational state and the Kl15 input is turned from on to off, the following
emergency message will be sent once. In this case CANcockpit will still remain in its current CANopen (NMT) state for at
least 5 seconds. However after this delay time it will switch off without further notice.
Byte
0 1 2 3 4 5 6 7
Value
0x15 0x30 xx 0x00 0x00 0x00 0x00 0x00
Content
Emergency Error Code Error register Manufacturer specific Error Field
2. On the transition from "Reset Communication" to "Pre-Operational" an emergency message will be sent, if an EEPROM
checksum was error detected.
Byte
0 1 2 3 4 5 6 7
Value
0xEE 0x63 xx 0x00 0x00 0x00 0x00 0x00
Content
Emergency Error Code Error register Manufacturer specific Error Field
Simple J1939 <-> CANopen Gateway
If possible, translation from J1939 and CC analogue / frequency inputs to CANopen limited to display of D’MAC or data
recorder. This function must be configurable via WINgauge.
2 messages from CANopen to J1939 configurable in increments of 1.5msec interval.
To limit the processing time required for this function variable will be transferred without further scaling or formatting.