6 DCP Interface
YASKAWA TOEPC710616134G AC Drive L1000A Technical Manual Addendum 43
■ Travels at Intermediate Speeds V7, V6, V5, V3, V2, and V1
For additional description, also refer to Travels at V4 followed by Constant Deceleration Distance SV4 on page
41.
Long Travel at Intermediate Speed :
The same procedure as in Figure 6.9 with fast speed applies whereas in step (1), the appropriate intermediate
speed must be transmitted. The deceleration distance is dependent on the selected speed.
• V3 (Intermediate 1 [Bit G6]) > SV3
• V2 (Intermediate 2 [Bit G5]) > SV2
• V1 (Intermediate 3 [Bit G3]) > SV1
• V7 (Intermediate 4 [Bit G10]) > SV7
• V6 (Intermediate 5 [Bit G9]) > SV6
• V5 (Intermediate 6 [Bit G8]) > SV5
Time-Optimized Short Travel at Intermediate Speed :
The same procedure as described in Figure 6.10 with fast speed applies whereas in that step (1), the appropriate
intermediate speed must be transmitted.
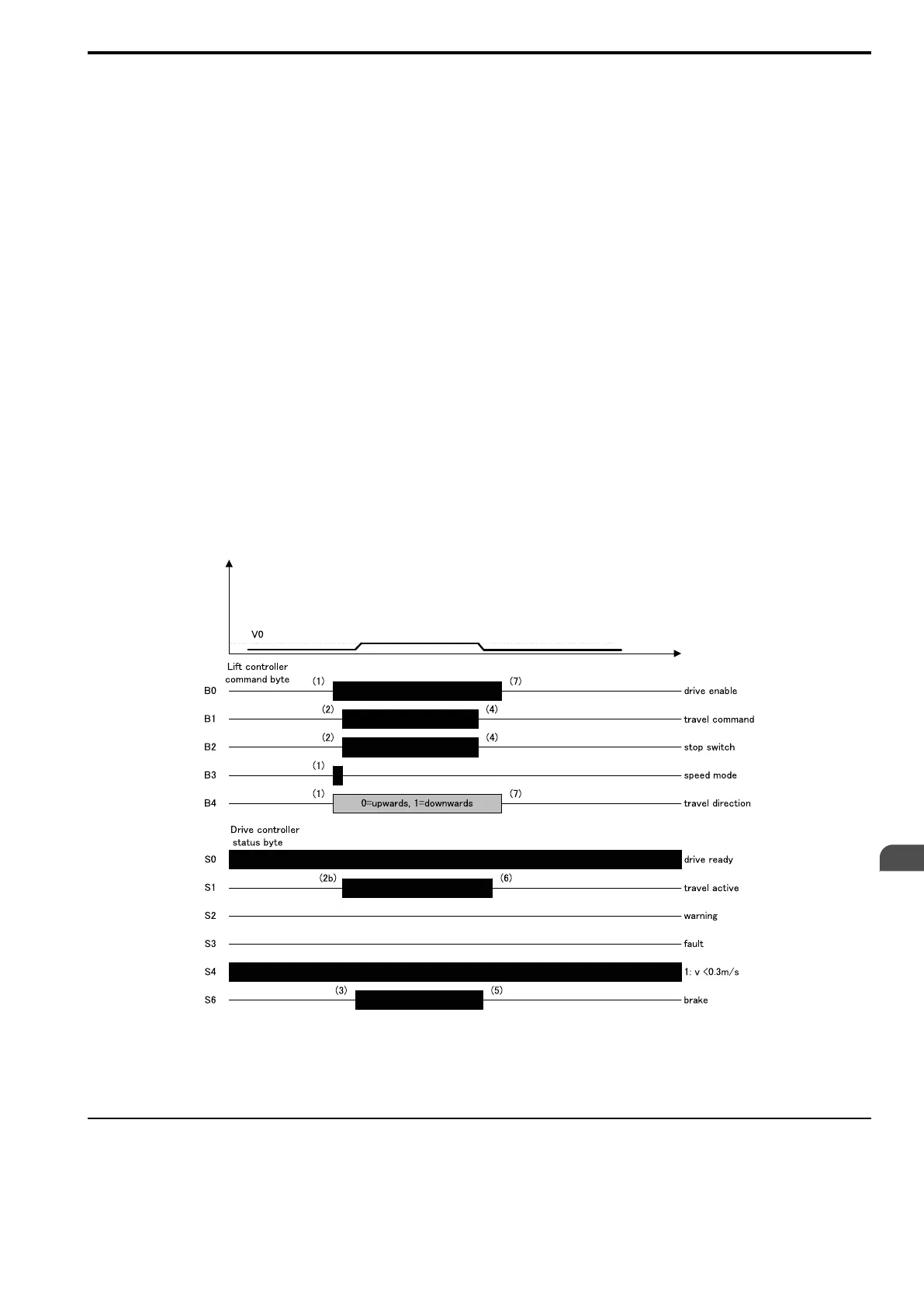
■ Crawl Travel in DCP3
1. Before the travel starts, the speed mode "Crawl [bit G0]" (V0) is transmitted.
2. The travel starts with activating the travel command bit B1 and the stop switch bit B2.
3. After travel command bit B1 and the stop switch bit B2 have been reset, the drive decelerates.
4. Drive controller enable bit B0 must not be switched off until the mechanical brake bit S6 and the motor
contactor bit S1 have been switched off.
Figure 6.11 Crawl Travel (DCP3)
Note:
The lift can also be operated without travel command bit B1. For travels with stop switch bit B2 only, the speed selection is
automatically set to crawl speed V0. B1 can be set or reset at any time. The important bit for crawl travel is B2.
◆ DCP4: Lift Controller with Absolute Sensor System
With DCP4, travels are normally carried out time-optimized and dependent on remaining distance. Furthermore,
travels not dependent on remaining distance as described later are supported here, allowing special kinds of
travels, e.g. teaching travels for the absolute sensor system.
EN

 Loading...
Loading...







