11 Direct Landing 2
YASKAWA TOEPC710616134G AC Drive L1000A Technical Manual Addendum 83
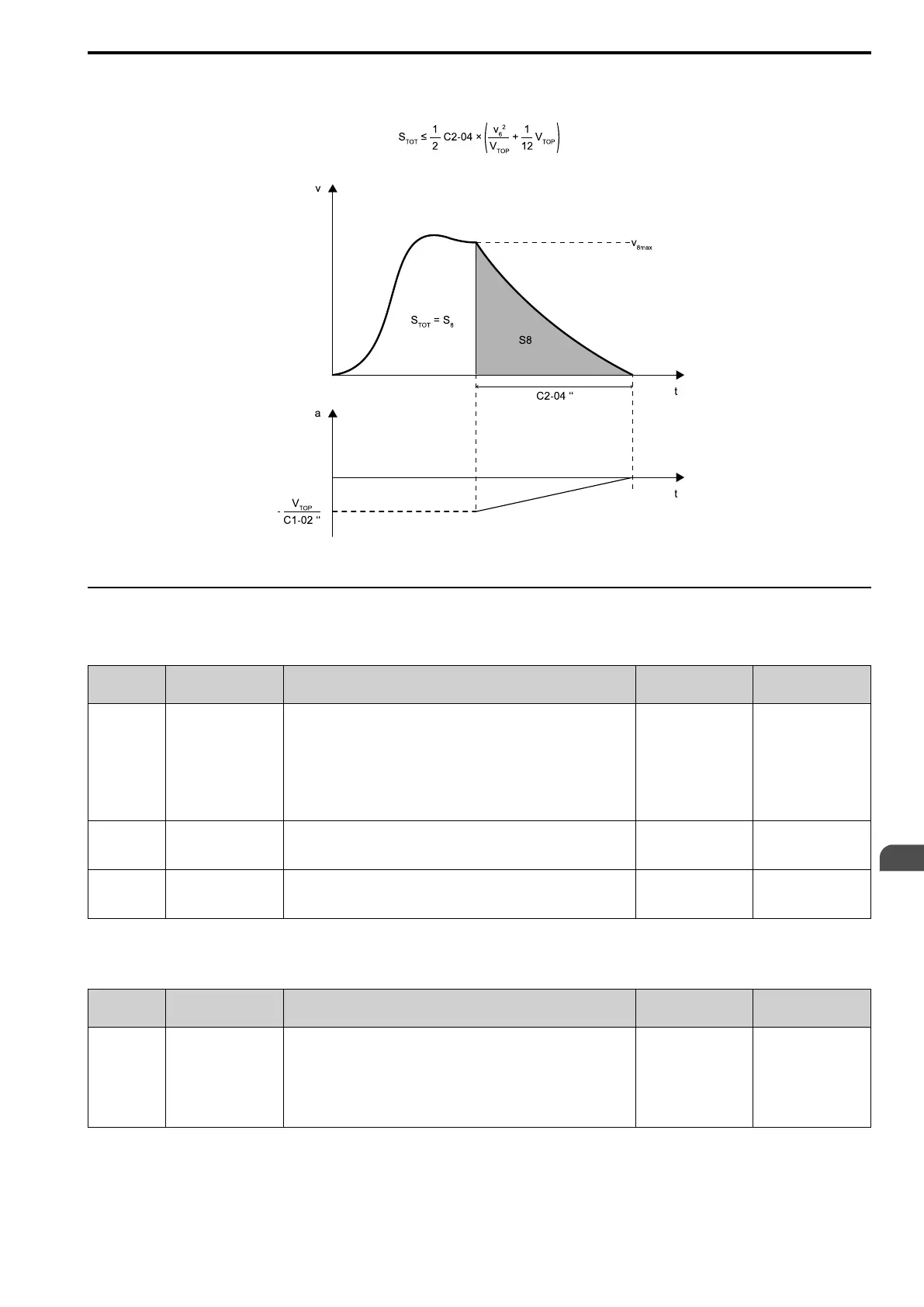
Profile 2 :
In this profile, C1-02 and C2-04 are adapted to match the position target. This profile is selected when:
Figure 11.3 Profile 2: Without Linear Deceleration
◆ Related Parameters and Monitors
■ Added Parameters
Parameter
(Hex.)
Operator Display Description Value Range Default Value
S5-15
(06E1)
DL2 Pos Distance
Direct Landing 2 Positioning Distance
After 5Fh activation, the distance in S5-15 is travelled until the drive stops.
The external RUN command is switched off internally.
For correct distances, set o1-20, o1-21, and o1-22 correctly.
Note:
This parameter can be changed during RUN before the positioning
command is given (DIMF 5Fh activation) to account for intermediate
calls.
0 ... 5000 mm
(0.00 ... 196.85 in)
*1
100 mm
(3.94 in)
*1
S5-16
(06E2)
DL2 In Pos Width
Direct Landing 2 In-Position Width
If U4-45 ≤ S5-16 [Remaining Distance ≤ DL2 In Pos Width] for the time S5-17
[DL2 In Pos Time], the drive sets the digital output 70h [In-Position].
0 ... 10 mm
(0.00 ... 0.39 in)
*1
3 mm
(0.12 in)
*1
S5-17
(06E3)
DL2 In Pos Time
Direct Landing 2 In-Position Time
If U4-45 ≤ S5-16 [Remaining Distance ≤ DL2 In Pos Width] for the time S5-17
[DL2 In Pos Time], the drive sets the digital output 70h [In-Position].
0.00 ... 5.00 s 0.60 s
*1 Values not in parentheses apply when o1-12 = 0. Values in parentheses apply when o1-12 = 1.
■ Added Standard Parameter Scroll Items
Parameter
(Hex.)
Operator Display Description Value Range Default Value
S5-10
(02C0)
Stop Method Sel
Stopping Method Selection
Selects the stopping method:
0 : Speed Control
1 : Direct Landing
2 : Leveling Distance Control
3 : Direct Landing 2
0 ... 3 1
EN

 Loading...
Loading...







